

Introduction: Autonomous Line Follower Robot





This is a line follower which i had built in the first year of my undergraduate engineering program. The robot uses arduino as it's brain and is able to follow black line drawn on a white surface i.e it's a black line follower with simple logic for everyone to understand.
Step 1: Materials Required
*Arduino UNO
*L293d motor driver module(provotech)
*Ir sensor modules(provotech)
*Motors 200 rpm
*Male to male jumper wire
*Female to male jumper wire
*Scrap mouse (PC mouse not the actual alive one)
*Castor wheel (small)
*12v/5v power supply
Step 2: Chassis

I used a scrap computer mouse for my robot chassis. It was perfect because it was light small and was available to me at no cost.
Step 3: Assembling the Parts


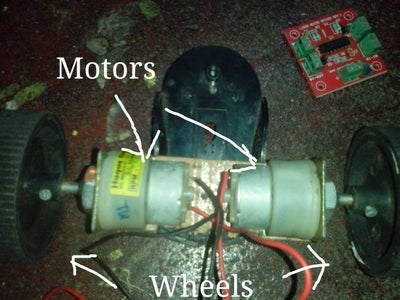


At first i connected the castor wheel below the mouse base as shown. Then used some plyboard to extend the width of the rear part so that i can connect the motors to it.Then the motor driver was intalled at the centre of the mouse. The sensors were first attached to a piece of cardboard and then they were also joined to the main chassis. Now the entire hardware part is done.
Step 4: Connections
Just connect the pins as follows:
Enable left motor pin to pin :9
Enable right motor pin to pin:10
left sensor :6
centre sensor:3
right sensor:5
Left motor (from motor driver board):A0
Right motor(from motor driver board):A1
*Connect all the power supplies according to datasheet of the respective devices
* All pins are available on the Arduino Uno board.
Step 5: Arduino IDE







Just copy the above shown code.

Step 6: Complete Robot








