

Introduction: Building the Builder Robot



The Builder Robot is a complete mobile robotics platform and includes an arm with a gripper and an active vision system. These instructions describes the steps to but together the robot from 3D printed files. Instructions are also included on how to assemble the electronic systems of the robot. The intention is that it should be possible to build the robot by following the steps.
The main parts of the builder robot are the sensory systems, locomotor systems, arm with gripper and the on-board computer running the Ikaros system (Balkenius, et al. 2010).
Sensory Systems Each camera is mounted on a servo that allows it to move up or down. The robot can also measure the voltage and the current it uses. This can be used to estimate the power used by the robot at any time. In addition, all servos provides information about their current position, their temperature and other data.
Locomotion System The locomotion system uses a holonomic drive system with four Mecanum wheels mounted on servos. This allows the robot to move in any direction on the ground.
Arm and Gripper The arm has five degrees of freedom and a gripper that allows it to pick up and manipulate objects. The arm and gripper is controlled using seven servos. Each servo system provides feedback about the current position of each joint.
On Board Computers The Builder Robot has a Mac Mini on board that is modified to run off battery. There is an Arduino Mega that is used to control the LED strip around the body of the robot.
Ikaros Control System The Ikaros framework (www.ikaros-project.org) provides the robot with features such as real-time sensory processing and motor control, threading, web based monitor interface, and a selection of over 200 modules for various processing and control functions (Balkenius, et al. 2010). The internal state of the robot (sensor values, navigation, etc.) can be monitored remotely from a web browser over WiFi.
Building the robot involves main steps:
Download the STL-files for the robots from Thingiverse: Thingiverse Builder Robot
Print all the parts with support. We used a Makerbot Replicator 2 with default settings for PLA for the robot shown in the figures below, except for parts N that were printed in NinjaFlex on a Replicator Dual.
Remove the support material.
Install the Ikaros system on the Mac Mini as described here: http://www.ikaros-project.org/installing/osx/
More info: Lund University Cognitive Science Robotics Group
References
Balkenius, C., Morén, J., Johansson, B and Johnsson, M. (2010). Ikaros: Building Cognitive Models for Robots. Advanced Engineering Informatics, 24 (1), 40-48
Step 1: Robot Parts



Step 2:

Put the lower back pieces (A and B) of the robot together.
Step 3:

Add the lower front part (C) of the robot together with the assembled parts (A+B). Also put the top parts (D+E) of the robot together.
Step 4:

Mount three servos on first link of the robot arm (G). Make sure that the servos goes all the way in and that no left over support is blocking them.
Step 5:

Carefully mount a servo onto the second link of the robot arm (H) by gently bending it apart.
Step 6:

Mount a servo onto the third link (I) of the robot arm.
Step 7:

Mount a servo onto the fourth link (J) of the robot arm and put the third (I) and fourth part together (J).
Step 8:

Add the two gripper pieces (L and M) onto the forth arm part (J). Make sure that the gripper parts are align with each other.
Step 9:

Lock the gripper pieces (L and M) by putting the lock part (K) onto the fourth arm part (J).
Step 10:

Add the rubber pads (N) to the grippers (L and M).
Step 11:

Put together the forth (J) and the third (H) robot arm part.
Step 12:

Put the first (H) and second (G) robot arm part together.
Step 13:

Mount a servo inside the top part of the robot (D).
Step 14:

Turn the top part over and add the ball bearing.
Step 15:

Mount the first part (F) of the robot arm to hold the ball bearing at place. Remember to include the arm servo cable though the first robot part (C+D).
Step 16:

Put the arm (G-M) together with the top (F) of the robot.
Step 17:

Add the wheel mounting part (O) onto four servos.
Step 18:

Add the inner part of the wheel and the distance part (P).
Step 19:

Add the rest of the wheel parts and the outer wheel for each wheel.
Step 20:

Push the wheel servos into the robot body. Make sure that there is no left over support and that the wheels have been assemble correctly.
Step 21:

Push the cameras into camera holder parts (Q). The camera holder parts have a stop inside that will fixate the cameras orientation. Removing the camera can be tricky so make sure they are correctly inserted into the camera holder parts (Q).
Step 22:

Put the servo wires and camera cable through the holes in the robot top and push the servo into the robot top.
Step 23:

Set the ID of the servos.
Step 24:


Cut the LED strip at 74 cm and mount it inside the robot body as shown in the picture.
Step 25:

Turn the robot body upside down and mount the battery connectors and all the cables. All the batteries are connected in parallel.
Step 26:

Add the current and voltage sensor to the power circuit.
Step 27:


Connect the power circuit to the servo power supply.
Step 28:


Connect the wheel servos and arm servos.
Step 29:

Mount the USB port inside the robot top part.
Step 30:


Make two USB to serial cables. All the servos are connected on the same power circuit but the serial data is split between the wheels and the reset of the servos.
Step 31:

Install the cables from step 29.
Step 32:
Modify the Mac Mini to operate on 12 volts by bypassing the power supply inside the mac mini.
Step 33:

Connect the Mac Mini to the power circuit.
Step 34:

Mount the gyro inside the robot body as in the picture.
Step 35:
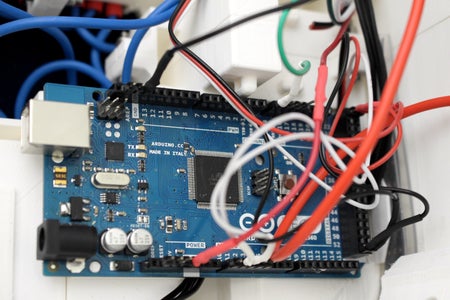
Mount the Arduino inside the robot body and connect the voltage, current and NeoPixel strip.
Step 36:

Hot glue any lose parts inside the robot.
Step 37:



Add four USB extensions cables with 90 degrees connectors. Check all the wiring.
Step 38:

Carefully insert the Mac Mini into the robot body.
Step 39:

Mount the top part of the robot and insert the batteries.
Step 40:

Congratulations, your robot is ready!







