

Introduction: Simple Arduino and HC-SR04 Example

After buying a HC-SR04 from Amazon, I could not get it to work out of the box. Not wanting to concede I had a DOA sensor on my hands, I searched for a simple example setup. After spending far too long on this than I felt I needed to, I decided to make this instructable to help other emerging tinkerers get their project off the ground.
I admit this example is more than bare-bones in that it has LEDs, but this lets me test it without needing a PC to show distance and check the accuracy of the sensor.
Step 1: Parts List
Arduino UNO R3 (I use the Adafruit mount)
One (1) HC-SR04 Ultrasonic Sensor
One (1) Red LED
One (1) Green LED
Two (2) 560 ohm (Green, Blue, Brown, Gold) Resistors
Half Breadboard
Eight (8) Male/Male hookup wires
A ruler that measures centimeters (or use the serial monitor)
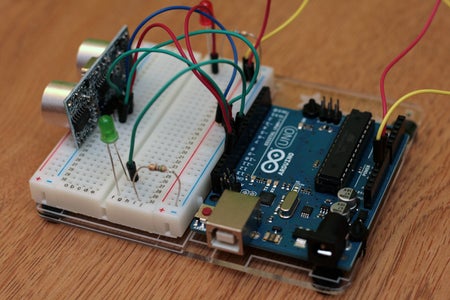
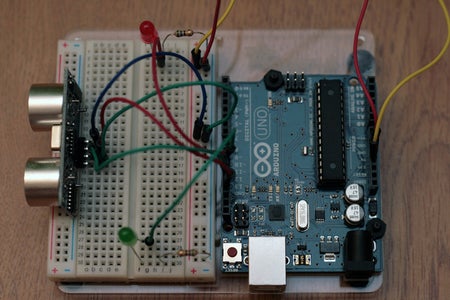
Step 2: Connect the Components
Connect the components and wires as shown in the two pictures.
Step 3: Upload the Sketch
/*
HC-SR04 Ping distance sensor]
VCC to arduino 5v GND to arduino GND
Echo to Arduino pin 13 Trig to Arduino pin 12
Red POS to Arduino pin 11
Green POS to Arduino pin 10
560 ohm resistor to both LED NEG and GRD power rail
More info at: http://goo.gl/kJ8Gl
Original code improvements to the Ping sketch sourced from Trollmaker.com
Some code and wiring inspired by http://en.wikiversity.org/wiki/User:Dstaub/robotcar
*/
#define trigPin 13
#define echoPin 12
#define led 11
#define led2 10
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
pinMode(led2, OUTPUT);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW); // Added this line
delayMicroseconds(2); // Added this line
digitalWrite(trigPin, HIGH);
// delayMicroseconds(1000); - Removed this line
delayMicroseconds(10); // Added this line
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance < 4) { // This is where the LED On/Off happens
digitalWrite(led,HIGH); // When the Red condition is met, the Green LED should turn off
digitalWrite(led2,LOW);
}
else {
digitalWrite(led,LOW);
digitalWrite(led2,HIGH);
}
if (distance >= 200 || distance <= 0){
Serial.println("Out of range");
}
else {
Serial.print(distance);
Serial.println(" cm");
}
delay(500);
}








