

Introduction: Arduino CNC Drawing Machine (or the Road to Success)
This project is based on mostly items which are easy to find. The idea is to take two unused computer disk units and combine them to create an automated drawing machine which resembles a CNC machine.
The pieces used out of the drives include the motors and railings from both of the drives and the plastic assembly of at least one of the drives (including tray)
Step 1: Requirements for Your Journey:
Pieces needed:
- Arduino uno
- 1 stepper motor (we used the model number 28BYJ-48)
- Adafruit motor shield v2
- Lots of wires
- Two computer cd trays
- optional: some 3d printed gears and rails
- Some wood or structural material A computer
Arduino Code Required:
- Custom GRBL code to work with Adafruit motor shield (Riley_adafruit_cnc_2)
Computer Software needed:
- Arduino IDE Plotter https://github.com/zapmaker/GrblHoming/releases
- Gcoded picture or drawing files (google your file of choice).
Tools needed:
- Soldering equipment
- Glue gun and glue sticks
- Ruler
- Pen
- Patience

Step 2: Destruction


Take apart the dvd trays making sure to keep the structural integrity of at least one of the dvd trays while removing the metal component which usually has two railings. The process of taking these trays appart will vary from different cd trays. The two motor drives should look like the picture below once removed. Notice the part which spins the disk has been removed as it will not be needed.
Step 3: Soldering On

Once taken apart, the next step is to solder the terminals into the motor which may be seen in the picture. Again the way these terminals attach to the motor may differ according to the specific model. The way these connect to the Adafruit motor shield will be discussed later. Replicate the same setup for the second disk drive motor assembly.
These two will serve as our Y and Z axis in the drawing process.
Step 4: The Mighty Tray


The next step is to get the disk tray working which will be the X-axis. For this purpose the stepper motor was used and the assembly required cutting parts of the tray to fit the gear through. (see pictures) At this point we realized our gear ratio was off and further tinkering was needed. At the end we opted to print a 4 to 1 ratio gear to allow for the smoothness and travel distance required to successfully complete the drawing without running out of room.
Step 5: The Arduino Affair


Put together the Arduino assembly and the motor shield setup. For this step a bit of soldering is needed. There will be two Adafruit Motor Shields stacked. Due to the way they operate a bridge needs to be soldered for the second arduino to be identified as such. The process behind that is explained here:
https://learn.adafruit.com/adafruit-motor-shield-v...
Solder the bridge as shown below labeled 1 for the top Adafruit motor shield. The first board should be (0x60) and the top board should be (0x61). Also, notice the jumper labeled 2. This is set on both the bottom and top shields telling the boards to draw their power from the arduino instead of the blue terminals right above it. You may choose to connect your own power source to these blue terminals if you find the arduino lacking. (Note, that while running the three motors we have the arduino connected to the computer plus a 9v power supply running to the arduino as well)
Step 6: Trial by Fire


Test! Before putting it all together test your parts. We found it particularly difficult to find information about how to connect stepper motors to the Adafruit Motor Shield. So here is a helpful diagram. It is important to point out that pin 1 and 4 (blue and orange) and pin 2 and 5 (pink and yellow) are pairs. Sometimes plugging these in the wrong way may mean a reverse in how the motor operates. Also, Red is ground in this diagram as shown below. If the disk assembly motors only have 4 terminals, leave the ground without connection.
To manage the movement of the motors use the software which was outlined in the required tools, using the plotter software in the link provided.
A really easy way to test which terminals are pairs is to test with a ohm-meter.
Here is a great guide on how to find your stepper motor wire pairs:
https://knowledge.ni.com/KnowledgeArticleDetails?i...
Once you found your pairs, put the first one into M1, the second into M2
Step 7: The Assembly Line

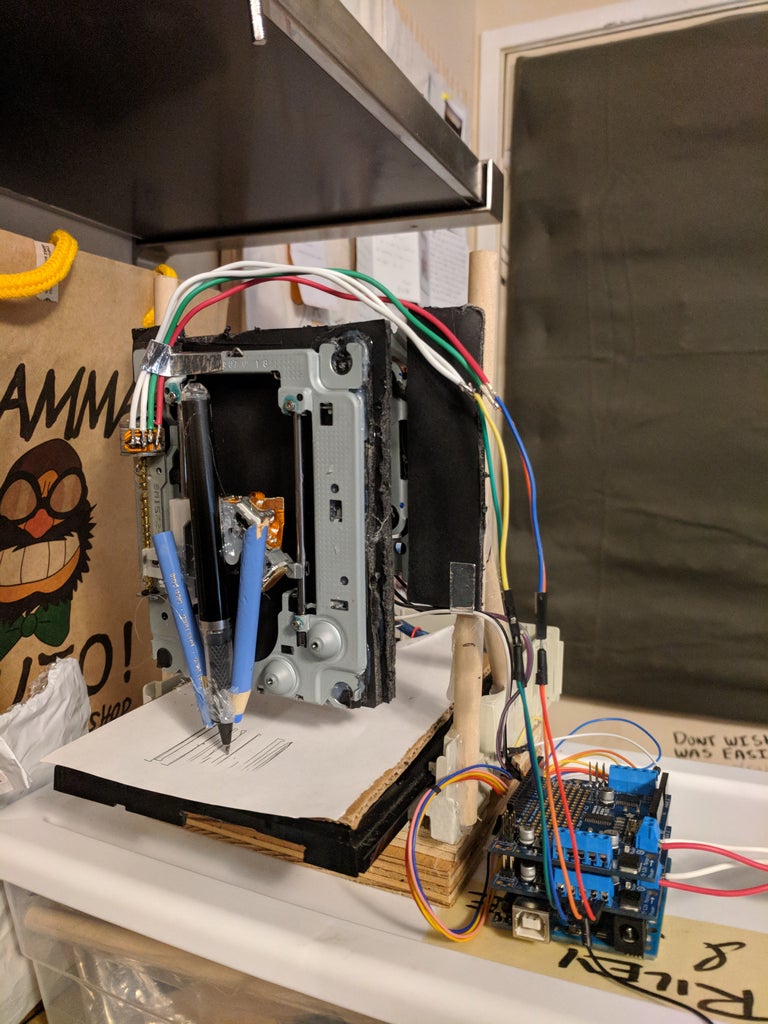
Once all the motors have been tested you can start assembly. The first step is to create a structure to hold the Y and Z axis above the X-axis. This was done with simple items purchased from a hobby store. See picture below.
Step 8: Float On

The next step is to attach the Z-axis to the Y-axis assembly this was done mainly with hot glue although surely we would have done it differently with more time and tools.
Step 9: Hacker Time!

Now it's Arduino programming time. The first step is going to be to upload the attached code into your Arduino. After opening your Arduino IDE and opening the attached program all you have to do is hit change the port to the one your arduino is plugged into and hit the ARROW (or upload button) to send it.
Step 10: Success Is an A!?

While this code is based on the original GRBL code, its important to note that it's been heavily modified to work with adafruit motor shields. Because of this, there are many missing functions that are in GRBL that do not work when inputted into this setup.
However, for any basic plotting (that is drawing) this code works perfectly. It can draw any GCODE that has been formatted as G90.
If you have build the same setup as we have, then your arduino will now work! If you have made a different version using different motors or different dimensions then you will have to change the configuration file that was included in the Arduino code.
** ONLY MAKE CHANGES TO THE “config.h” FILE, CHANGES ANYWHERE ELSE IN THE CODE WILL CAUSE THE PROGRAM TO NOT WORK **
Looking back we could have probably used the assembly of the tray as it was and reinforce some of the structure, measure better for tilt of different axis and just make it more structured overall. It is a neat project which could be scalable and applied for other uses.
Once you have a basic understanding of how GRBL works, and how X,Y,Z axis stepper motors works, this project is extremely scalable as long as you have the materials to do so. We chose to make one this size because we were limited by the DVD tray size. However, if you chose to make one using belts and stepper motors you would only be limited by the steppers torque.







