

Introduction: Follow Me Robot Using Arduino Based Embedded Platform





We will move forward and design our first autonomous robot. This robot will follow any object coming in front of it within a range of 5-10 cm. We will be using two IR sensors (proximity sensors), which will detect objects in front of them and send a signal to the robot. Both sensors will be attached in the front of the robot, one on the left side and one on the right side.
Step 1: Component List
Hardware
- evive
- IR Sensors
- Dual Shaft DC Motors
- Base Plate
- Wheels
- Caster Wheel
- Motor Mounts
- Jumper Cables
- Bolts and Nuts
Software
All the Hardware components and the Dabbe app can be found in the STEMpedia Starter Package. Not just this number of other projects can be made using it.
Step 2: Making the Base Robot
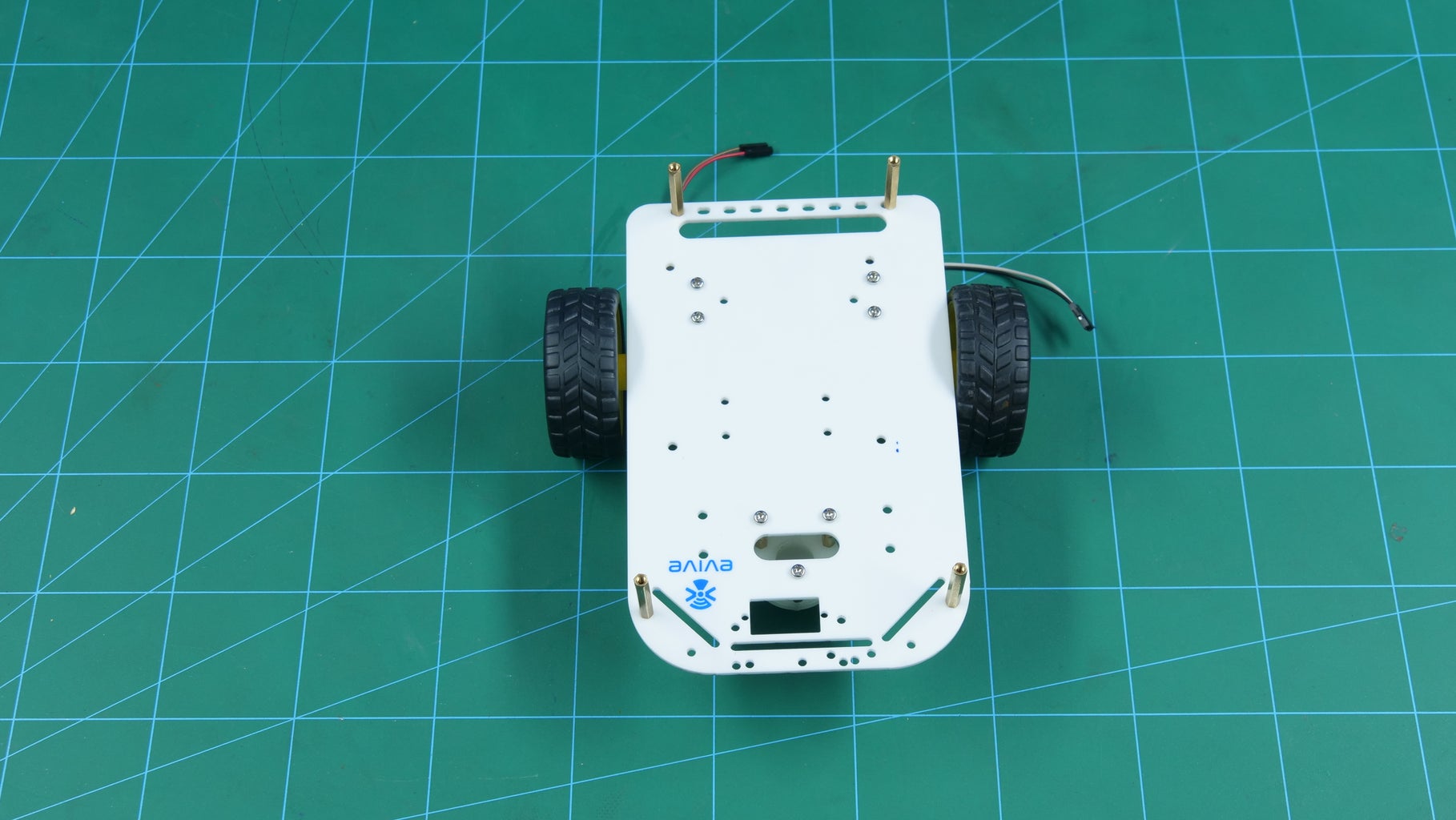
Take a base plate ya chassis.

Mount two motor mounts using M3 bolts and nuts.

Onto these motor mounts, attach Dual Shaft DC Motors.

Once you mount the motors, fix the wheels onto the free shafts.

For any robot to get stable, we will be needing third support. Thus, we will be adding a caster wheel to do the job.

Flip the assembly. Thus, our base is ready.
Step 3: Attaching Evive

Take evive and the base robot that we have already made and attach it using bolts and nuts as shown in the figure.
Step 4: Completing the Assembly

Fix the IR Sensor in the front of the robot as shown in the figure using bolts and nuts.
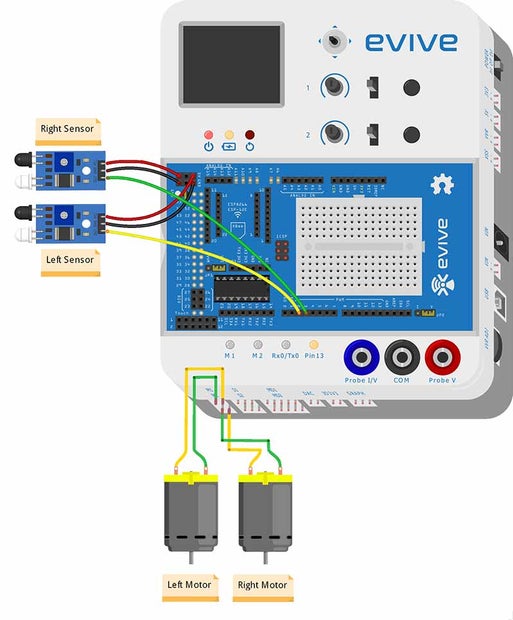
Step 5: Making the Connections
Make the connection as shown in the given figure:
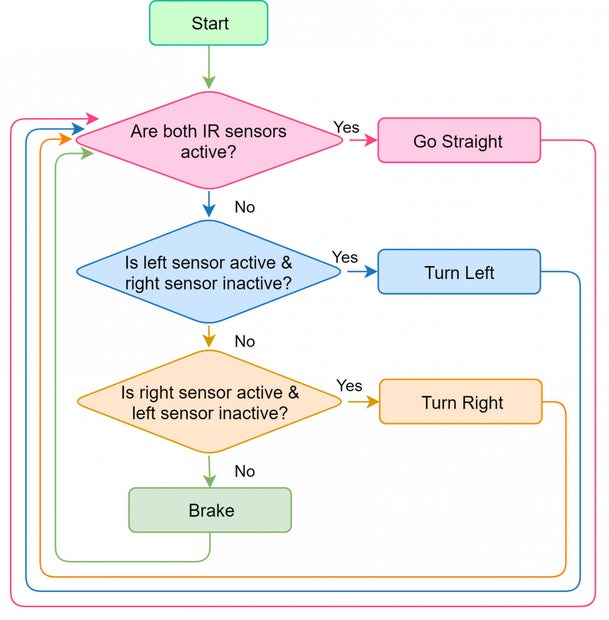
Step 6: Logic and Flowchart
Our robot can execute four actions:
- Go Straight
- Turn Left
- Turn Right
- Stop or Brake
If both the sensors are active (object in front), then the robot should move forward to follow the object. If only the left sensor is active (object on the left), then the robot should turn left. If only the right sensor is active (object on the right), then the robot should turn right. If both the sensors are inactive, the robot should be stopped (brake).
Step 7: Code
Upload the script given below to evive





Attachments

Step 8: Conclusion
With this, your new age pet is all set to accompany you wherever you go!
Did you know that we’ve reached 112% of our goal within a week into our campaign? Isn’t that amaaazing?! To know what’s making this campaign a huge success, visit HERE!







