

Introduction: Forward Kinematic With Excel, Arduino & Processing




Forward Kinematic is used to find End Effector values (x, y, z) in 3D space.
Step 1: Basic Theory
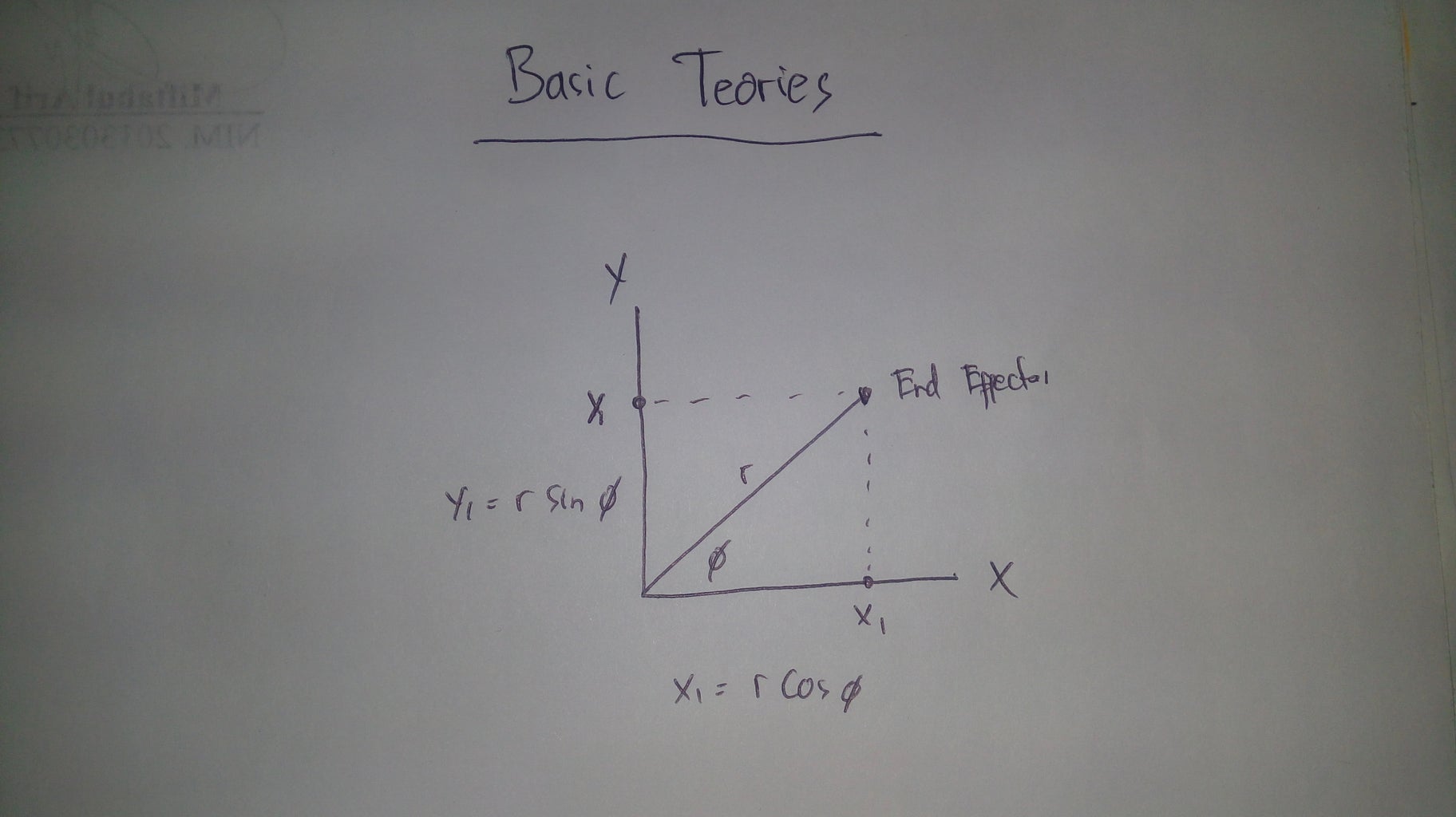
In principle, forward kinematic uses the theory of trigonometry that is combined (joint). With the length (r) and angle (0) parameters, the End Effector position can be known, namely (x, y) for 2D space and (x, y, z) for 3D.
Step 2: Model
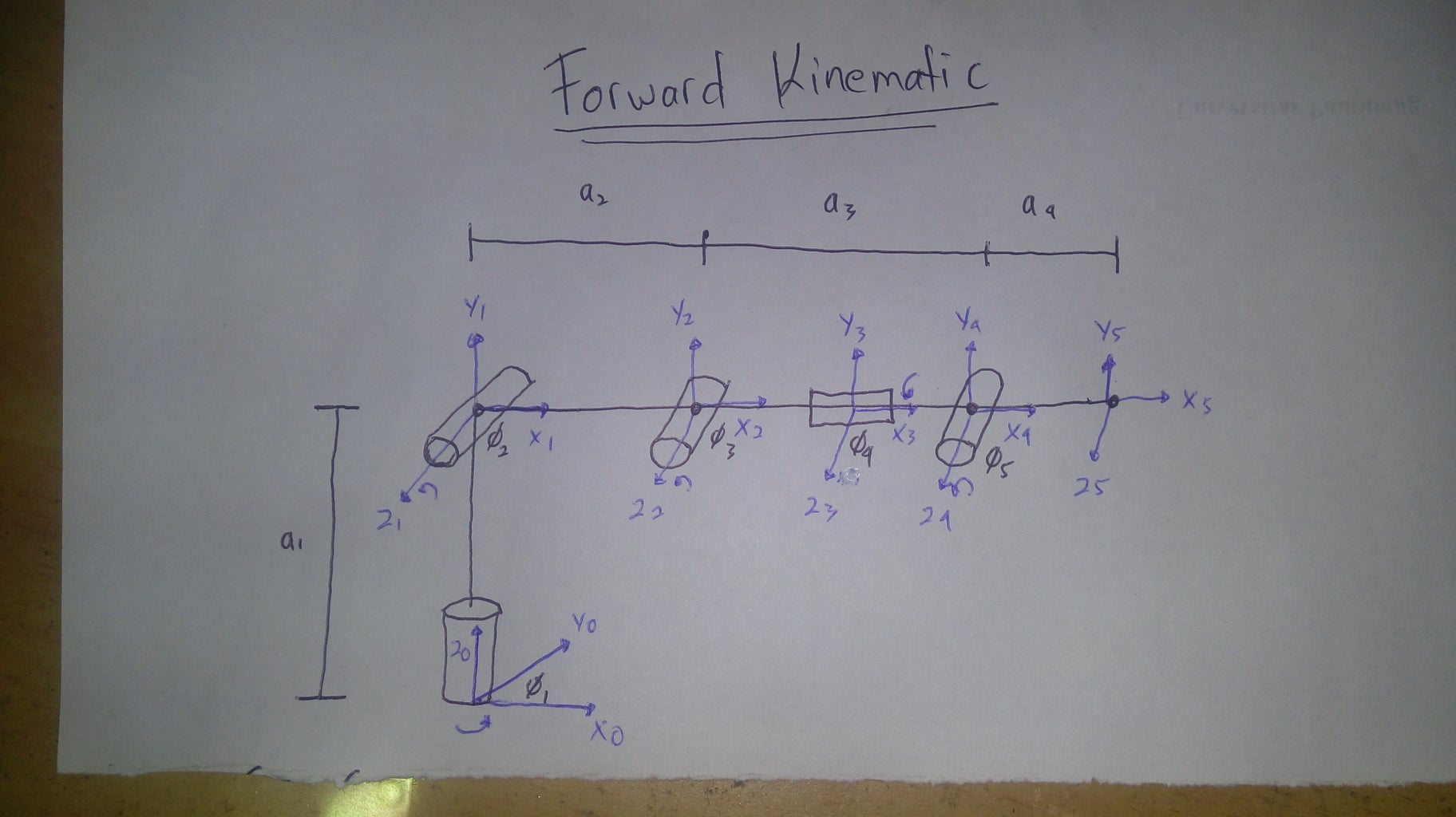
The model is assumed with teta1 (0 degree), teta1 (0 degree), teta2 (0 degree), teta3 (0 degree), teta4 (0 degree). And length a1-a4 = 100mm (can be changed as desired). Angles and lengths can be simulated in Excel (download file).
Step 3: End Effector

From the matrix above the formula is simulated using Excel.
Step 4: Excel Simulation
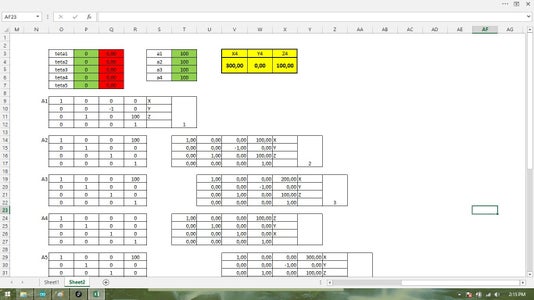

In Excel1 is the basic theory of reference. For angles and lengths can be modified as needed. Which will later be known End Effector (xyz). For Excel is a system that I made.
Step 5: Arduino Diagram and Sistem




Supplies :
1. Arduino Uno 1 pcs
2. Potentiometer 100k Ohm 5 pcs
3. Cable (needed)
4. PC (Arduino IDE, Excel, Processing)
5. USB Cable
6. Cardbard (needed)
I put Arduino Uno in a used PLC box to avoid static electricity. For wiring diagrams see figure. For the Forward Arm Kinematic raft hardware system in accordance with the system that has been made.
Step 6: Arduino Program Upload

Arduino program files are in the download file.
Step 7: Processing Simulasion

Program on File Downloaded.
Step 8: Final


Reference :
1. https://www.thingiverse.com/thing:2882172
2. Theory (on file download)
3. https://www.youtube.com/watch?v=ootJaik2iow&t=2s


Participated in the
Assistive Tech Contest







