

Introduction: High Torque Encoded DC Motors for Robots From Car Window Motors






Hi! This instructable will show you how to modify car window lifting motors that you can salvage from old cars in order to use them in your robots. This kind of motors have a very high torque and you only need to make some adapter pieces to make them usable in your robots. It is a short version of the original post I made in my blog that can be seen here.
If you salvage this kind of motors from old cars, the first thing you have to do is to test them. Plug them into a 5V or 12V power supply and check if they spin. The motors have a worm gear that gives them a very high torque and stops them from rotating if any mechanical force is applied to them. They only rotate if current is flowing through the coils of the motor.
Step 1: Make First Adapter Piece
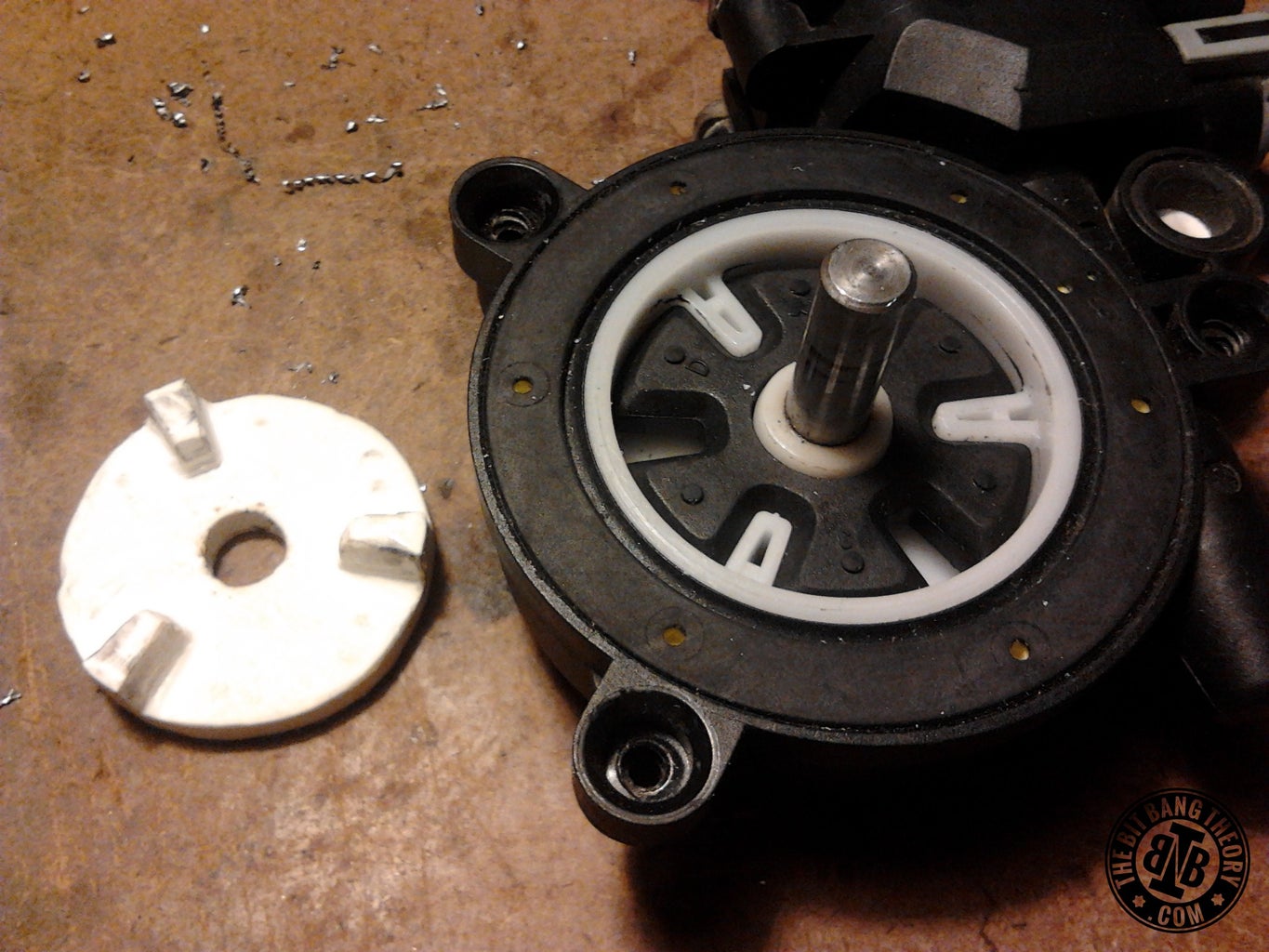

The motors that I got have an interesting thing: the axle does not spin. The only thing that rotates is the white plastic part with three teeth around the axle. Those three teeth fit together with a black rubber piece that has a total of 6 slots. You'll have to make a piece that will fit in the remaining three slots. I used my Dremel and a piece of Arnite plastic to make it.
Step 2: Extending the Axle















Then I verified that the axle wasn't long enough to hold the wheels that I wanted to use, which were two 100mm wheels from inline skates. Another thing that I had to do was to find a way of keeping the wheel in place. So, hacking of the motor was needed and I thought of a way of extending the axle using a piece of 8mm threaded rod where I could also put a nut to keep the wheel in place.
The first thing you'll have to do after cutting the piece of threaded rod with the size you find to be appropriate is to drill it through its center with a 3mm drill. However, the drill has to be perfectly aligned, so that the threaded rod will also be perfectly aligned with the motor's axle. To do it I use a bench drill and a small trick:
- Place the drill bit with the tip pointing upwards inside the chuck;
- Tighten up the chuck and lower it until you are able to lock the drill bit in the vise;
- Release the drill bit from the chuck and place the threaded rod piece inside the chuck;
- The drill bit will now be stationary and perfectly vertically aligned with the chuck and the piece of threaded rod will rotate on top of the drill bit when you turn it on.
After drilling through the center of the threaded rod, place the wheel in the axle and use the drilled piece of threaded rod as a guide to make a hole in the center of the motor's axle with a 2.5mm drill. Then, use a 3mm tap set to tap the 2.5mm hole in the motor's axle and to finish use an M3 screw to attach the threaded rod to the motor's axle.
Since the 8mm threaded rod actually has a diameter slightly smaller than 8mm you may want to have a better support for the bearing that fits inside the wheel, Use epoxy glue to add a little more thickness. Before applying the epoxy glue cover the tip of the threaded rod with black tape, so that you can place a nut in it later. Then sand it down until you have the desired diameter.
Step 3: Make Second Adapter Piece


Now you still have to make another plastic part of Arnite to attach to the wheel. Again, using the Dremel, make a plastic part that will fit inside the wheel and glue it with epoxy glue.
Step 4: Join Plastic Adapters With Encoder Wheel



Glue both plastic pieces with epoxy glue. A transparent plastic sheet with a printed encoder wheel may be placed in the middle of both pieces.
Step 5: Place Encoders


Then you just have to use hot glue to attach the tiny encoders that I mentioned in my previous instructable to the motor, put the wheel in place and put a nut in the axle to hold it in place.
Step 6: Motor Ready to Use
And that's it! By the end of this process you should have a motor ready to use :) I hope this instructable was useful for you and if you want to get more information about this project and see higher quality photos, visit my original blog post about this project here: http://www.thebitbangtheory.com/2013/05/high-torque-encoded-dc-motors-robots-car-window-motors/ . You you wish to see other projects I made feel free to visit my blog The BiT Bang Theory.
This instructable was submited to the Epilog Laser Challenge. Please vote for it! :) If I win I'll use the Zing to cut and engrave the parts of the body of the robot that I'm making :)

Participated in the
Epilog Challenge V







