

Introduction: How to Build a Robot
how to make a robot that can pull the most weight in the fastest time
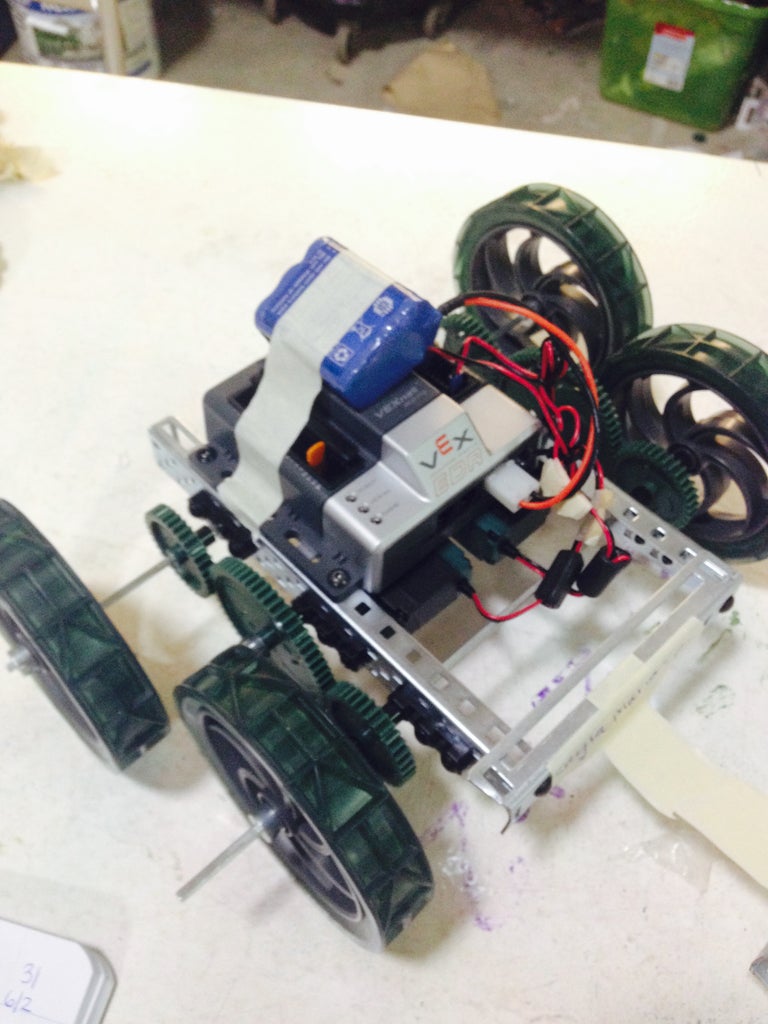
Step 1: Materials

Robot
-(2 )60 tooth gear
-(4) 36 tooth gear
-(6) flat bearing
-(1) controller
-(2) motors
-(4) 50mm wheels
-(11) .318 spacers
-(2) 12" drive shaft
-(10) collars
-(1) battery
-(14) keps nuts
-(18) 8-32x1/2 " screws
-tape
Sled
-(12) keps nut
-(10) .318 spacers
-(5) bearing blocks
-(14) 8-32x1/2" screws
Step 2: Base

take 2 8-32 x1\2 screws and 2 keps nuts anbd attach the end of 2 chassis rails to a 10 hole angle bar
Step 3: Motors
attach the motors
Step 4: Bearing Flats
gather 3 bearing flats and 4 keps nuts and attach them towards the front of the rail. Repeat for the other rail
Step 5: Square Bars
take 2 square bars and push them through the open holes on each bearing flat all the way through.
Step 6: Outer Gears

place a spacer on the outer square bars, then add a 32 thooth gear next to the spacers on the outer two square bars. repeat for both sides
Step 7: Middle Gears

On the middle square bar add a 64 tooth bar, then place a small spacer and a collar to stop it off. repeat to both sides
Step 8: Wheels

on the front square bar, measure 2 inches then add a collar, a 50 mm wheel and another collar. repeat for other side. on the back square bar, add 2 spacers, a 50 mm wheel, and a collar. repeat for both sides
Step 9: Controller


take 2 screws and 2 keps nuts and screw the outer corners of the controller to the chassis rails
Step 10: Battery

take a piece of tape and tape the battery to the top of the contoller
Step 11: Sled



build sled and attach to the robot with tape
Step 12: Speed
Actual speed of robot: 55.56 cm/s
Theoretical speed of robot: 102.41cm/s







