

Introduction: How to Programming for Humanoid Robot



More by the author:




About: LewanSoul specializes in product development and creation, especially in the field of bionic robots, we provide the majority of users with superior hardware and software products. We have manufactured robots&r…
H3S is an intelligent humanoid robot with 16 high-precision digital servos. We can use PC software (visual programming software) to create new actions for robot. Let's give it a shot!
Step 1: Use PC Software to Create New Actions
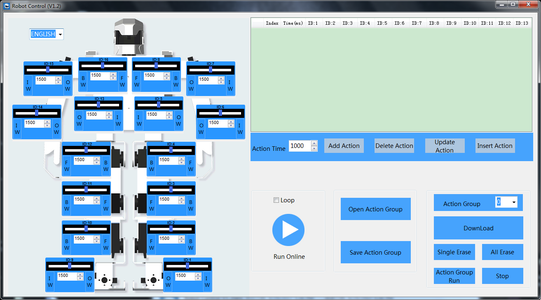
We must first understand about how to use this PC software before programming for robot.
Step 2: Let's Create Some Cool Actions


In this video, you can see how to program for robot with this visual programming software. So you can make robot walk, turn left or right, dance or this kind of things,it is easy for a new beginner or robot enthusiasts to create new gameplay.







