

Introduction: PAPER HUNGRY ROBOT - Pringles Recycle Arduino Robot


![CHOOM [FINAL] Follower Robot Circuit Connection, Building Leader Robot](https://content.instructables.com/FE6/JBHP/KDU8TA57/FE6JBHPKDU8TA57.jpg?auto=webp&crop=1%3A1&frame=1&width=130)
![CHOOM [06] 21 Axis Humanoid (Follower) Robot](https://content.instructables.com/FTD/6LEJ/KDU8T65F/FTD6LEJKDU8T65F.jpg?auto=webp&crop=1%3A1&frame=1&width=130)

This is another version of Hungry Robot which I built in 2018. You can make this robot without 3d printer. All you need to do is just buying a can of Pringles, a servo motor, a proximity sensor, an arduino and some of tools. You can download all the files from the drawing to the source code for it.
Step 1: PREPARING

Need to buy
Important Links
- Source Code https://github.com/happythingsmaker/TrashEatingRo...
- Drawing File (PDF: Print it with "Actuall Size") https://www.thingiverse.com/thing:2984461
- Arduino IDE https://www.arduino.cc/en/Main/Software
- Install CH340 Driver (for Chinese version) http://www.wch.cn/download/CH341SER_ZIP.html
Step 2: PRINT PDF DRAWING



URL : Drawing File (PDF: Print it with "Actuall Size") https://www.thingiverse.com/thing:2984461
Attachments

Step 3: ROUND SHAPE PART



Cut the paper and put it on the cardboard. These parts are to separate space inside of the robot.
Step 4: BODY PART















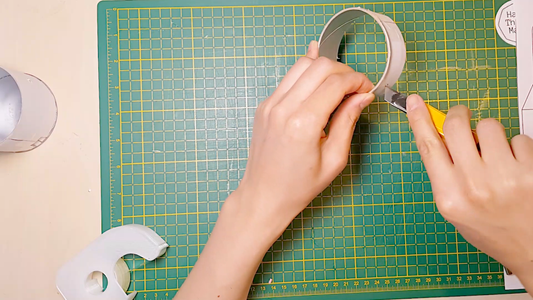
Put the paper on the empty Pringles bin and cut the bin along the line. You have to be careful when you cut the bin. As you can see the picture, you need to put the thumb behind the cutter's direction.
Step 5: HEAD PART



You can make the head part as the same we made the body frame. If you have a proper tool, use it. If you don't have, you can just use stationary like a sharp pencil. The hole is used for link frame.
Step 6: HAND PART 1 : FRAME













It is very straight forward. Attach the paper on the Pringles and cut them along the line.
There are 2 holes for links and 2 square holds for the servo motor.
Step 7: HAND PART 2 : SERVO MOTOR HORN



when you buy the servo motor, the horns are enclosed. You need to make it secure them using a hot melt glue,
Step 8: MAKING a LINK




This is an important link for making the head open at the same time when the hand moves.
Step 9: SENSOR PART





Because the Pringles bin is not big enough to have a board such as an Arduino Shield. So, we need to make it as small as possible. So, we need to cut the wire and strip the wires one by one. The white material is "Closed End Cap". Wire to cables one by one.
Step 10: SERVO MOTOR






As we made a sensor part, we need to make the motor cable.
Step 11: ARDUINO PART

https://www.arduino.cc/en/Main/Software
Download and Install the IDE
Step 12: CH340 DRIVER (FOR CHINESE VERSION)

http://www.wch.cn/download/CH341SER_EXE.html
Step 13: DOWNLOAD THE SOURCE CODE




Source Code : https://github.com/happythingsmaker/TrashEatingRobot
If you don't know how to upload a source code file into your Arduino, follow this picture.
Select
- Board - "Arduino Nano"
- Processor - "ATmega328 (Old version - if yours is Chinese version)
Plug a USB cable
- Wait a 5 second
- open "Device Manager"
- Check the com port
- Check the Com port
Click upload button
Step 14: BODY ASSEMBLY - PART 1






Put the servo motor and the sensor and secure them using a hot melt glue.
Step 15: BODY ASSEMBLY - PART 2 (CIRCUIT)
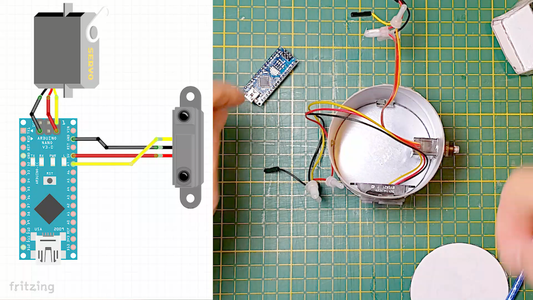




Now, let's assemble everything with the Arduino. The first picture shows how they will be connected.
Step 16: BODY ASSEMBLY - PART 3 (HAND AND BODY)


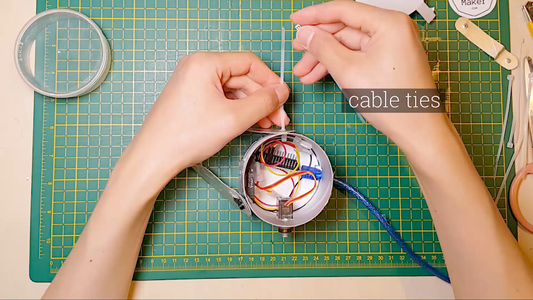





Because this robot is very small size, mechanical parts such as bearings doesn't need to be used. Just use cable ties. Put the horn on the servo motor and put power into the Arduino using USB cable. Adjust the angle of motor and hand.
Step 17: BODY ASSEMBLY - PART 4 (LINK AND HEAD)












In order to make the head move with the hand at the same time, you need to assemble the link both the hand frame and the head frame.
Step 18: ETC. ( or Most Important)



Let's attach eyeballs using Blu-tack
Step 19: DONE


If you have any question, feel free to leave yours. Thank you!







