

Introduction: Phantom 2 Vision Plus Bait Drop Mechanism



Easy and effective way of adding a drop mechanism to your phantom 2 camera up and down lever on the side without constantly engaging the servo this saving battery life and your servo or adding an extra channel.
The camera is still fully functional just the tilt mechanism should be kept down while attaching your drop and flying it out to the desired area I tested this to 300m with a max of 600 grams and it worked perfectly every time if you want to drop your load simply tilt the camera to max holding it for a few seconds in order for the load to drop.
This is achieved by an Arduino nano that constantly reads the RC channel if it detects a maximum signal on the channel it counts a few second to eliminate a false signal the arduino then activate the servo send it to the open position where after it deactivate the servo again if the tilt is send to the down position the opposite happens.
Initially I wanted to connect the servo directly to the tilt channel on the Phantom but the circuitry has a camera stabilizing function that keeps the servo constantly activated and this on its first flight caused the servo to burn out causing a short and sending the Phantom falling out of the sky from 20 meters.
Step 1: You Will Need



Materials:
- Arduino Nano
Zebra ZS-M218 Micro Servo and screw for horn
servo extension cable x 2
8cm 2mm metal rod "metal release mechanism"
- m3 nut and bold 10mm "top of servo
- small seftapping screw 3mm "bottom of servo"
- 3D Print "frame and nano holder and horn"
- glue
- cable ties "the smallest I could find for insurance"
Tools:
- Screwdrivers
- Instructions on opening your phantom 2



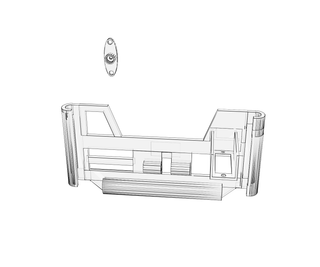
Step 2: Print the Frame and the Nano Box


I Printed these items separately and glued the box on after wards.
This was printed with PETG with a 50% infill to give it more sturdiness.
The frame fits snugly over the standard landing gear this design is not flawless but it does the job.
Step 3: Wiring the Phantom




You Need to open your drone and connect a servo cable on the open connector f2 "negative brown or black on top" on the controller and route it to the open leg hole to achieve this you'll have to carefully unclip the pins from connector using a small sharp nail or something similar to get it through the small leg hole.
Opening the drone I recommend searching a tutorial on "Opening a Phantom 2 vision Plus".
Step 4: Servo Rod

Bend it about 5 cm and half a cm up with a twist at the end otherwise it dislodge from the horn.Feed rod through hole on mechanism frame and connect to servo horn and servo
Step 5: Putting It Together

Glue the box onto the frame of the mechanism
Attached the servo using the m3 nut and bold on the top and self tapper screw on the bottom cut the connector off the servo and route it to the box gluing it as you route through the round hole leave enough wire to connect it to the arduino.
Use the second servo wire and cut of the female connector and push through the round hole of the nano box.
Solder the wires as per diagram do not use the regulated power from the arduino this is insufficient for the servo and will cause the micro controller to reset.
Fit to Phantom if desired you may drill two small holes on the side of the mechanism and tie it down with cable ties for extra insurance although I found that when the load is added it tugs on the landing gear and wont just fall off.
Step 6: Clossing the Box

Squize it in and close the box
Step 7: Program and Test
I used the rc phantom software to invert my camera pitch this might not be needed but works better for me.
The Software is straight forwad There is a hole on the side of the box to connect the usb there is also a serial routine showing the rc data comming in and when the servo is triggered by changing
"countnum2 > 130000" value will change the delay of the servo trigering
Happy bait casting!

Participated in the
Summer Fun Contest 2016







