

Introduction: The Crawli - a Simple Walking Soft Robot







Soft Robotics is a young field of robotics that keep growing everyday. However, many soft robotic projects in the community are simple actuators or soft sensors, not full soft robots. This is the Crawli. It's a crawling soft robot that only uses one air input. I've tried my best to make it as small and simple as possible.
Materials:
- 1/16" Tubing
- 1/8" Tubing
- 1/8" Y-connector
- Ecoflex 00-30 or Ecoflex 00-50
- x5 small zip-ties
- Air source
- Using a squeeze bulb is easiest, but you can use a small pneumatics system if you're up for a bit of a challenge.
Tools:
- x2 clamps
- Small syringe
- Flush Snips
- Tweezers
- Cup
- Spoon
- 3D printer
Also, I am entering this Instructable in the Instructables Robotics Contest. If you like this Instructable, I encourage you to vote, for which I would be extremely grateful.
Step 1: 3D Print the Molds

3D print bottomMold.stl and topMold.stl in PLA, ABS, or HIPS at .2mm layer height with 10% infill and 3 shells. Do not use supports.


Step 2: Casting







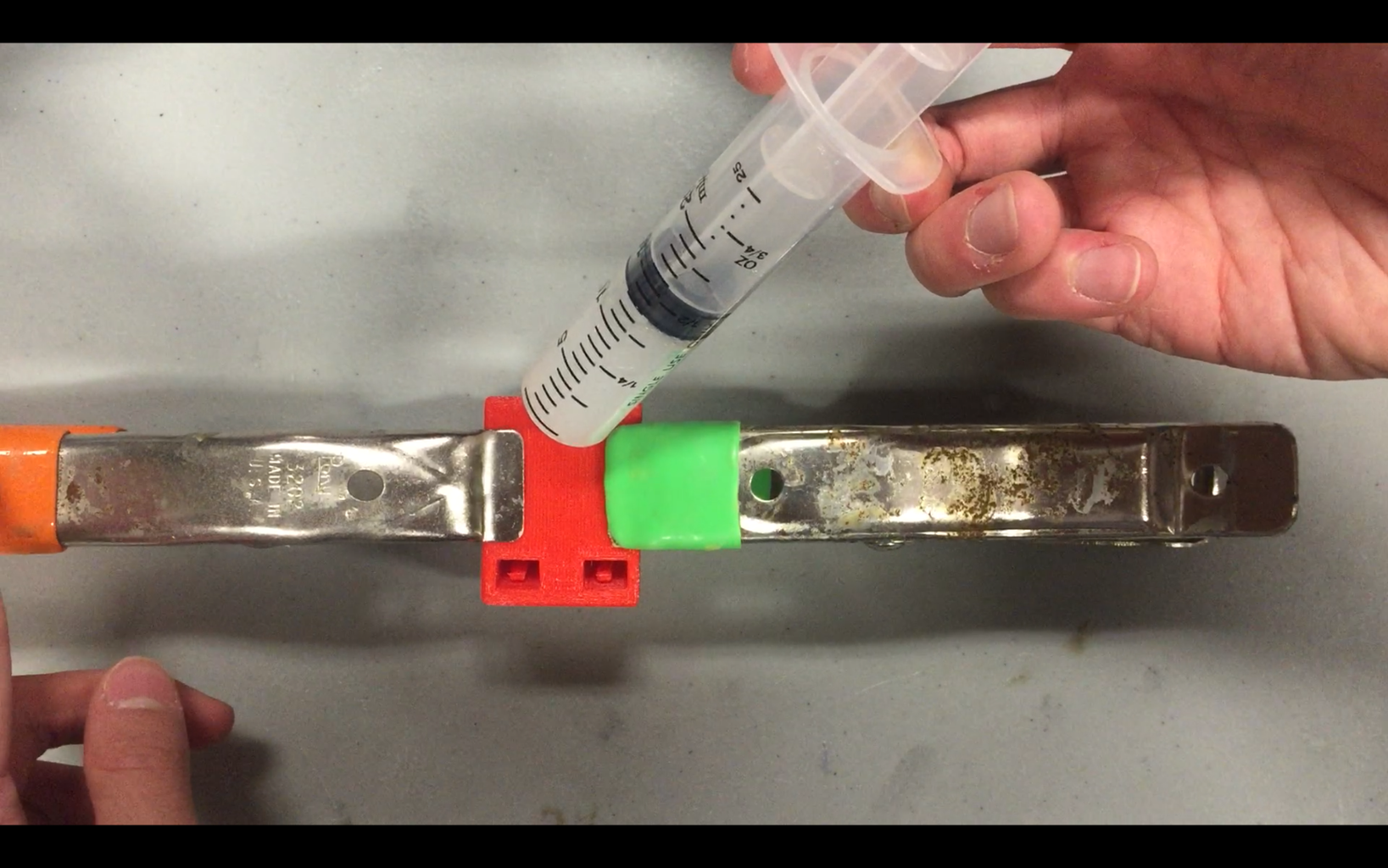


Start by putting the top mold on top of the bottom mold. Put one clamp on either side of it. Then, use the spoon to scoop ~2 scoops of each part of the silicone mix into the cup. Ecoflex is a 1:1 ratio silicone mix, so try to get it pretty even. Mix thoroughly. Use the syringe to suck the silicone out of the cup. Then, inject the silicone into each of the openings in the mold until the mold is filled to the brim. Let it cure for 4 hours.
Step 3: Demold




Once the silicone has cured, we can demold the cast. Remove the clamps and use tweezers to pry the two parts of the mold apart. You want to pull the top mold off first. Once the top is off, pull from to legs of the Crawli until it pops out of the other part. Use the flush snips to clean off any flash.
Step 4: Tubing




Now that it is out of the mold, we can connect the tubing. Insert short lengths of the 1/16" tubing into the openings of the legs. Put zip-ties around the points where the tubing and the Crawli meet, as shown in the picture. Then, connect short lengths of the 1/8" tubing to the 1/16" tubing by pushing the 1/16" tubing into the 1/8" tubing. Use zip-ties to keep these connected too. Connect the short ends of the Y-connector to the open ends of the 1/8" tubing. Then use one final zip-tie to tighten the wires together. You can then use a long piece of 1/8" tubing to connect from the Y-connector to your air source.
Step 5: Operation

To make the Crawli walk, pump rapid and small pulses of air to it. Make sure not to move the tube that is connected to your air source too much because it is very easy to jostle the robot.

Participated in the
Robotics Contest







