

Introduction: Sonar Radar System Using Arduino, Servo & Ultrasonic (HC-SR04)


Although they rely on two fundamentally different types of wave transmission, Radio Detection and Ranging (RADAR) and Sound Navigation and Ranging (SONAR) both are remote sensingsystems with important military, scientific and commercial applications. RADAR sends out electromagnetic waves, while active SONAR transmits acoustic (i.e., sound) waves. In both systems, these waves return echoes from certain features or targets that allow the determination of important properties and attributes of the target (i.e., shape, size, speed, distance, etc.). Because electromagnetic waves are strongly attenuated (diminished) in water , RADAR signals are mostly used for ground or atmospheric observations. Because SONAR signals easily penetrate water, they are ideal for navigation and measurement under water.
ULTRASONIC (HC-SR04): The HC-SR04 Ultrasonic Sensor is a very affordable proximity/distance sensor that has been used mainly for object avoidance in various robotics projects . It essentially gives your Arduino eyes / spacial awareness and can prevent your robot from crashing or falling off a table. It has also been used in turret applications, water level sensing, and even as a parking sensor. This simple project will use the HC-SR04 sensor with an Arduino and a Processing sketch to provide a neat little interactive display on your computer screen.
SERVO: A servomotor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. It consists of a suitable motor coupled to a sensor for position feedback.
ARDUINO: Arduino is a computer hardware and software company, project, and user community that designs and manufactures microcontroller kits for building digital devices and interactive objects that can sense and control objects in the physical world.
Step 1: COMPONENTS:




SERVO
ARDUINO
ULTRASONIC (HC-SR04)
Connecting wires.
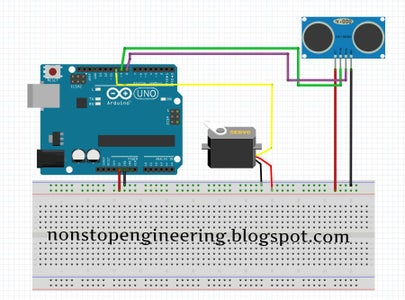
Step 2: CIRCUIT DIAGRAM
Step 3: IMAGES








Step 4: Code:
/*------------------------------------------
Sonar Radar System By nonstopengineering Using Arduino,Ultrasonic and Servo ------------------------------------------*/ #include //Servo Library
const int trigPin = 9; //Initializing trigger pin const int echoPin = 8; //Initializing echo pin long duration; int distance;
Servo myServo; // Creating a servo object for controlling the servo motor
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600); //Sets Baud rate for Serial communication
myServo.attach(10); // Defines on which pin is the servo motor attached
}
void loop() {
for(int a=0;a<=180;a++) // rotates the servo motor from 0 to 180 degrees
{
myServo.write(a); //Sending stes to servo which servo should move
delay(20);
distance = Distance(); // Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
Serial.print(a); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.println(distance); // Sends the distance value into the Serial Port
}
for(int b=180;b>0;b--) // Rversing rotation from 180 to 0 degrees
{
myServo.write(b);
delay(20);
distance = Distance();
Serial.print(b);
Serial.print(",");
Serial.println(distance);
}
}int Distance() // Function for calculating the distance measured by the Ultrasonic sensor
{
digitalWrite(trigPin, LOW); // Sets the trigPin on LOW state for 2 micro seconds
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Sets the trigPin on HIGH state for 10 micro seconds
delayMicroseconds(10);
digitalWrite(9, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance= duration*0.034/200; //Converting distance into meters
return distance;
}Step 5: ARDUINO CODE FILE
Attachments

Step 6: WORKING:

Participated in the
Arduino Contest 2016

Participated in the
First Time Authors Contest 2016







