

Introduction: Biped Robot



More by the author:



About: Hi, my name is Stephane. I am 14 years old and I love making things. Currently I am interested in robotics and programming in Java and Swift.
This is an awesome instructable on how to make your very own walking robot! This project is fairly simple and only requires basic arduino and coding skills.
Step 1: Making the Body

Materials:
An assortment of Balsa wood
Wood Glue
6 Nails
4 swivels
Step 1: Cut a piece of long rectangular balsa wood that is about 12 x 7 1/2 inches long (this will be the base).
Step 2: Cut two smaller rectangular pieces of balsa wood.
step 3: Cut two long square pieces of balsa wood.
Step 4: Cut two squares.
Step 5: Put the nail into the front and back of both squares.
Step 6: Attach a swivel onto the nails for each square.
An assortment of Balsa wood
Wood Glue
6 Nails
4 swivels
Step 1: Cut a piece of long rectangular balsa wood that is about 12 x 7 1/2 inches long (this will be the base).
Step 2: Cut two smaller rectangular pieces of balsa wood.
step 3: Cut two long square pieces of balsa wood.
Step 4: Cut two squares.
Step 5: Put the nail into the front and back of both squares.
Step 6: Attach a swivel onto the nails for each square.
Step 2: Finishing the Body

Step 1: Glue the two smaller rectangular pieces of balsa wood onto each side of the base like shown in the picture bellow.
Step 2: Glue each square with the swivel in it underneath the long square rod of balsa wood. Those will be the legs.
Step 3: At the top of each leg put a nail through.
Step 4: Attach the leg to the rectangles on the side of the base using the nails.
Step 2: Glue each square with the swivel in it underneath the long square rod of balsa wood. Those will be the legs.
Step 3: At the top of each leg put a nail through.
Step 4: Attach the leg to the rectangles on the side of the base using the nails.
Step 3: Mounting the Servo

Materials:
Fishing Line
2 Standard Hobby Servos
Step 1: Glue each servo onto each side of the rectangles attached to the base.
Step 2: String the fishing line through the front swivel on the balsa wood square, then through the servo horn and then through the back swivel multiple times. Make Sure Their is a lot of tension!
Step 3: Do step 2 for each foot.
Fishing Line
2 Standard Hobby Servos
Step 1: Glue each servo onto each side of the rectangles attached to the base.
Step 2: String the fishing line through the front swivel on the balsa wood square, then through the servo horn and then through the back swivel multiple times. Make Sure Their is a lot of tension!
Step 3: Do step 2 for each foot.
Step 4: Mounting the Arduino and Wiring Everything

Materials:
Arduino (I used the arduino mega)
Smaller Nails (or screws)
Step 1: Cut another rectangular piece of balsa wood the same size as the base.
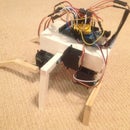
Step 2: Put the arduino mega on that piece of wood and push each nail (or screw) through the mounting hole.
Step 3: Glue the mounting plate to the top of the rectangles on the side of the base.
Step 4: Plug in your servo the the right pins on the arduino.
Arduino (I used the arduino mega)
Smaller Nails (or screws)
Step 1: Cut another rectangular piece of balsa wood the same size as the base.
Step 2: Put the arduino mega on that piece of wood and push each nail (or screw) through the mounting hole.
Step 3: Glue the mounting plate to the top of the rectangles on the side of the base.
Step 4: Plug in your servo the the right pins on the arduino.
Step 5: The Code!
The code is very simple. All you need to do is program each servo to move 20 degrees (this variable changes depending on how much tension you put on the fishing line).
Participated in the
Robot Contest

Participated in the
Arduino Contest







