Introduction: Self-balanced Instructables Robot






Hello, my name is Jorge and I have always been passionate about robots. I am also a fan of Lego Technic and the Robotics Mindstorm line. The last Lego kit in the Mindstorm line is the 51515 Robotic Inventor set and it is an excellent kit to create your own robots, in fact, I have several models available to build on my Rebrickable page. One of these robberies is a self-balancing two-wheeled Robot, so when I saw this contest, I started modifying my robot to become the Instructables Robot.
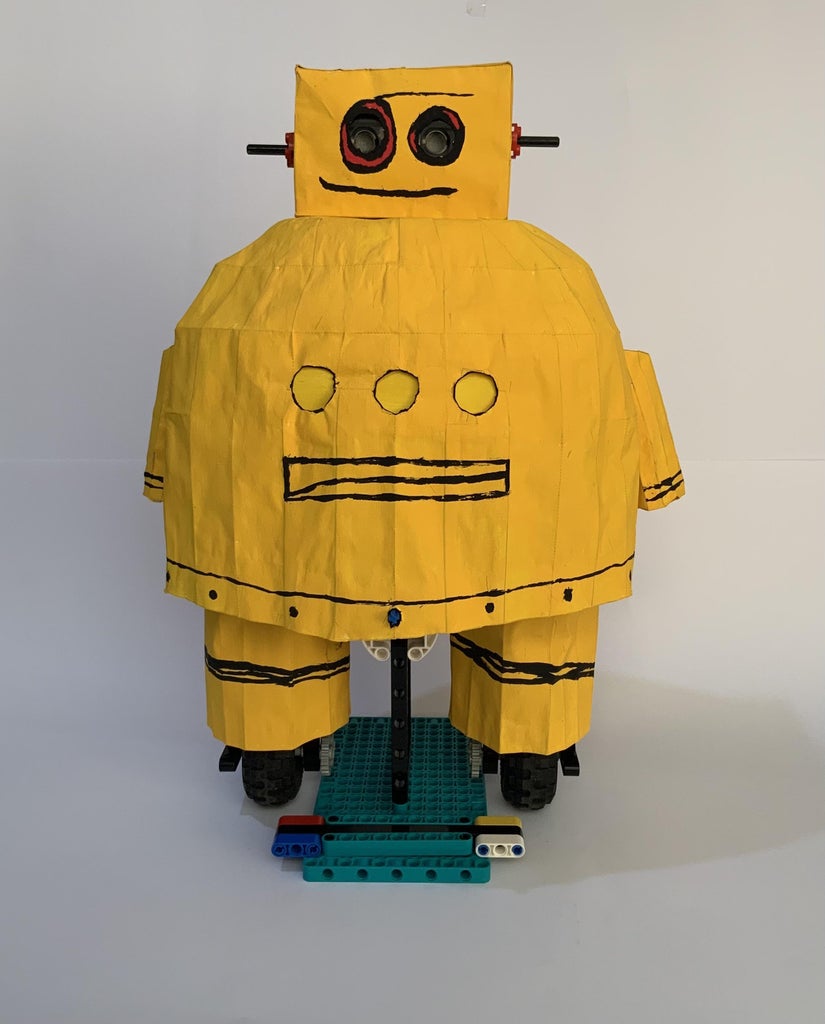
The robot is controlled by color commands. The yellow color makes the robot move in circles, the white color makes the robot spin on itself, blue color makes it move in a straight line oscillating back and forth.
The robot is divided into two construction phases. The first is the construction of a self-balancing robot with the 51515 robotic inventor kit, and the second is a paper model in the shape of the Instructables Robot with which we will cover our Lego robot.
I hope you enjoy assembling this robot, as much as I enjoy creating it.
Supplies





We are going to need a:
Lego MINDSTORMS 51515 Robot inventor set
The following material is not available in the Mindstorm Robot Inventor set. It can be purchased at Bricklink:
2x - Wheel 30.4mm D. x 20mm with No Pin Holes and Reinforced Rim
2x - Tire 56 x 26 Balloon
2x - Plate, Round 2 x 2 with Axle Hole
Additional material and tools:
Acrylic paint: Yellow, black, and red
Brushes
Scissor
White glue
Step 1: PREREQUISITES

To assemble this robot, it is necessary to have experience using the 51515 Robot Inventor kit, so I recommend that you have at least already assembled one of the five buildable models that come with the kit.
Step 2: PHASE ONE - CONSTRUCTION OF THE STRUCTURE OF THE ROBOT
We are going to start the first phase, which is the construction of the structure with the 51515 Robot Inventor kit.
Step 3: Right Leg: Transmission System









Let's start building the right leg.
We start with a motor (Instruction 1) to which we attach a Triple Perpendicular Axle and Pin Connector(Instruction 2), which serves to protect the motor cable, to which we attach the motor with two Pin with Friction Ridges Lengthwise(Instruction 2).
Now we are going to mount the gear supports, for this, we place a Liftarm Thick 1 x 15(Instruction 2) that we attach to the motor with two Pin with Friction Ridges(Instruction 3), and on this, we place a 3L Perpendicular Pin Connector with 4 Pins(Instruction 4).
On this Pin Connector Perpendicular 3L with 4 Pins we place a Liftarm Thick 1 x 7(Instruction 5), which will serve as support for the first gear.
We place the first gear (driver gear) Gear 24 Tooth(Instruction 6) between the two Liftarms and couple it to the motor through an Axle 4L(Instruction 6). Then we place the Idler Gear 24 Tooth(Instruction 7) and attach it to the Liftarm 1 x 15 with an Axle 1L with Pin without Friction Ridges Lengthwise(Instruction 7).
Finally, we place the driven gear (Instruction 8) and place it with an Axle 7L(Instruction 8) on which we are going to mount the wheel.
On the Axle 7L, we place two Technic Bush that will help us to center the wheel (Instruction 9).
Then we put the rim and the tire on the Axle 7L (Instruction 10), and we put a Technic Bush as a spacer (Instruction 11).
Now we are going to build the other end that will hold the wheel.
To do this, we attach to the motor a Pin Connector Block Liftarm 1 x 3 x 3(Instruction 13) with two Pin with Friction Ridges Lengthwise(Instruction 12). On this Pin Connector Block Liftarm 1 x 3 x 3 we place two Technic Pin 3L with Friction Ridges Lengthwise (Instruction 14), on these, we place a Liftarm Thick 1 x 3 as separator (Instruction 15) and finally we place a Technic Liftarm Modified Bent Thick 1 x 11.5 Double(Instruction 16) used to hold the wheel axle.
Step 4: Right Leg: Paper Support





Now we are going to build the supports that will give rigidity to our paper model.
For the front support, we use a Pin Connector Block Liftarm 1 x 3 x 3(Instruction 18) attached to the lower part of the motor by means of two with two Pin with Friction Ridges Lengthwise(Instruction 17).
For the inner support, we attach an Axle and Pin Connector Perpendicular 3L with Center Pin Hole to the Technic Liftarm Modified Bent Thick 1 x 11.5 Double by means of an Axle 2L(Instruction 19).
On this Axle and Pin Connector Perpendicular 3L with Center Pin Hole, we are going to place an Axle 3L and a Technic Bush and finally, we place an Axle and Pin Connector Perpendicular 3L with Center Pin Hole at 90 degrees (Instruction 20).
For the upper support, we put a Technic Liftarm Modified Frame Thick 5 x 7 Open Center attached to the motor by four Technic Pin 3L with Friction Ridges Lengthwise(Instruction 21).
To form the back support, we attached a Technic Liftarm Modified T-Shape Thick 3 x 3 to the Technic Liftarm Modified Frame Thick 5 x 7 Open Center(Instruction 22).
On this Technic Liftarm Modified T-Shape Thick 3 x 3, we place a Pin with Friction Ridges Lengthwise.
On the Pin Connector Block Liftarm 1 x 3 x 3(Instruction 13) we place a Technic Pin Connector Perpendicular 3L with 4 Pins and finally we place a Liftarm Thick 1 x 9(Instruction 23) on them.
DONE, We have finished the Right Leg.
Step 5: Left Leg: Transmission System









Now let's build the left leg.
We start with a motor (Instruction 25) to which we attach a Triple Perpendicular Axle and Pin Connector(Instruction 26), which serves to protect the motor cable, to which we attach the motor with two Pin with Friction Ridges Lengthwise(Instruction 26).
Now we are going to mount the gear supports, for this, we place a Liftarm Thick 1 x 15(Instruction 28) that we attach to the motor with two Pin with Friction Ridges(Instruction 27), and on this, we place a 3L Perpendicular Pin Connector with 4 Pins(Instruction 28).
On this Pin Connector Perpendicular 3L with 4 Pins we place a Liftarm Thick 1 x 7(Instruction 29), which will serve as support for the first gear.
We place the first gear (driver gear) Gear 24 Tooth(Instruction 30) between the two Liftarms and couple it to the motor through an Axle 4L(Instruction 30). Then we place the Idler Gear 24 Tooth(Instruction 31) and attach it to the Liftarm 1 x 15 with an Axle 1L with Pin without Friction Ridges Lengthwise(Instruction 31).
Finally, we place the driven gear (Instruction 32) and place it with an Axle 7L(Instruction 32) on which we are going to mount the wheel.
On the Axle 7L, we place two Technic Bush that will help us to center the wheel (Instruction 33).
Then we put the rim and the tire on the Axle 7L (Instruction 34), and we put a Technic Bush as a spacer (Instruction 35).
Now we are going to build the other end that will hold the wheel.
To do this, we attach to the motor a Pin Connector Block Liftarm 1 x 3 x 3(Instruction 37) with two Pin with Friction Ridges Lengthwise(Instruction 36). On this Pin Connector Block Liftarm 1 x 3 x 3 we place two Technic Pin 3L with Friction Ridges Lengthwise (Instruction 38), on these, we place a Liftarm Thick 1 x 3 as separator (Instruction 39) and finally we place a Technic Liftarm Modified Bent Thick 1 x 11.5 Double(Instruction 40) used to hold the wheel axle.
Step 6: Left Leg: Paper Support





Now we are going to build the supports that will give rigidity to our paper model.
For the front support, we use a Pin Connector Block Liftarm 1 x 3 x 3(Instruction 42) attached to the lower part of the motor by means of two with two Pin with Friction Ridges Lengthwise(Instruction 41).
For the inner support, we attach an Axle and Pin Connector Perpendicular 3L with Center Pin Hole to the Technic Liftarm Modified Bent Thick 1 x 11.5 Double by means of an Axle 2L(Instruction 43).
On this Axle and Pin Connector Perpendicular 3L with Center Pin Hole, we are going to place an Axle 3L and a Technic Bush and finally, we place an Axle and Pin Connector Perpendicular 3L with Center Pin Hole at 90 degrees (Instruction 44).
For the upper support, we put a Technic Liftarm Modified Frame Thick 5 x 7 Open Center attached to the motor by four Technic Pin 3L with Friction Ridges Lengthwise(Instruction 45).
To form the back support, we attached a Technic Liftarm Modified T-Shape Thick 3 x 3 to the Technic Liftarm Modified Frame Thick 5 x 7 Open Center(Instruction 46).
On this Technic Liftarm Modified T-Shape Thick 3 x 3, we place a Pin with Friction Ridges Lengthwise.
On the Pin Connector Block Liftarm 1 x 3 x 3(Instruction 37) we place a Technic Pin Connector Perpendicular 3L with 4 Pins and finally we place a Liftarm Thick 1 x 9(Instruction 47) on them.
DONE, We have finished the Left Leg.
Step 7: Connecting the Two Legs




Now we are going to connect the two legs.
On the Technic Liftarm Modified Frame Thick 5 x 7 Open Center of each leg, we are going to place two Technic Pin 2L with Friction Ridges Lengthwise (Instruction 49) and on these, we are going to place a Technic Liftarm Modified Frame Thick 11 x 15 Open Center (Instruction 50 ), which is the piece that supports the legs.
On the Technic Liftarm Modified Frame Thick Open Center we are going to place four Technic Pin 2L with Friction Ridges Lengthwise and two Technic Pin 3L with Friction Ridges Lengthwise(Instruction 51).
On these Technic Pin with Friction Ridges, we place two Liftarm Thick 1 x 7 (Instruction 52), and on these Liftarm Thick we place two Technic Pin 2L with Friction Ridges(Instruction 53) that will serve as support for the Mindstorm Technic Hub, but first, we are going to place the color sensor first.
Step 8: Color Sensor




We are going to build the support of the color sensor on the right leg.
We placed two Technic Axle 1L with Pin with Friction Ridges Lengthwise on the Technic Liftarm Modified Frame Thick 5 x 7 Open Center (Instruction 54).
On these Technic Axle 1L with Pin with Friction Ridges, we place two Technic Axle Connector 2L(Instruction 55) and on these, we place two Technic Axle 1L with Pin with Friction Ridges(Instruction 56). Finally, we place the color sensor (Instruction 57).
Step 9: Assembling the Body







Now is the time to place the Mindstorm Technic Hub (Instruction 58).
At the top of the Hub, we placed two Technic Pin 2L with Friction Ridges and two Technic Pin 3L with Friction Ridges (Instruction 59).
Now we place a Liftarm Thick 1 x 9 and a Technic Pin 2L with Friction Ridges (Instruction 60).
On the Technic Pin with Friction Ridges, we placed a Technic Liftarm Modified Frame Thick 7 x 11 Open Center that will serve as a support for the robot's head (Instruction 61).
On this Technic Liftarm Modified Frame Thick 7 x 11 Open Center, we place two Technic Pin 2L with Friction Ridges(Instruction 62).
Now we place four Technic Pin 2L with Friction Ridges on the rear of the Hub (Instruction 63) and we place a Technic Liftarm Modified Frame Thick 11 x 15 Open Center that supports the entire rear of the robot (Instruction 64).
Now we are going to place the supports for the cables. For this, we place two Technic Axle 1L with Pin with Friction(Instruction 65), and on them, we place the cable supports (Instruction 65).
Now we place four Technic Pin 3L with Friction Ridges(Instruction 66) and a Liftarm Thick 1 x 9(Instruction 67) that will serve later to place the supports for the paper model.
Step 10: Assembling the Head





For the upper part of the head, we are going to place five Technic Pin 2L with Friction Ridges(Instruction 68 & Instruction 69) and on these, we place two Technic Liftarm Modified Frame Thick 5 x 7 Open Center(Instruction 70 & Instruction 71).
Finally, we place the distance sensor by means of two Technic Pin 2L with Friction Ridges(Instruction 72 & Instruction 73).
Step 11: Assembling the Paper Support





Now we are going to place the supports that will give the paper model rigidity.
For the back support, we put a Technic Panel Plate 5 x 11 x 1(Instruction 74).
For the lateral supports, we place a Technic Panel Plate 3 x 11 x 1 held by two Technic Pin 2L with Friction Ridges on each side of the Technic Liftarm Modified Frame Thick 5 x 7 Open Center of each leg (Instruction 75 & Instruction 76).
For the front support, we placed a Technic Liftarm Modified Frame Thick 5 x 7 Open Center(Instruction 78) by means of two Technic Pin 2L with Friction Ridges(Instruction 77), and to reinforce it we placed four Technic Pin 2L with Friction Ridges(Instruction 79) and on them, we place a Technic Liftarm Modified H-shape Thick 3 X 5 Perpendicular (Instruction 80) and a Technic Axle 1L with Pin with Friction that will serve to secure the paper model to the structure.
READY, We have finished the supports for the paper model.
Step 12: Stand for the Robot and Color Tool











Now we are going to build the support for the robot and the color selector tool that tells the robot the movements to perform.
For the base, we used a Technic Panel Plate 11 x 19 x 1 and five Technic Pin 2L with Friction Ridges(Instruction 81) on which we placed a Liftarm Thick 1 x 9(Instruction 82). On this, we place three Technic Pin 2L with Friction Ridges (Instruction 83) on which we place a Technic Liftarm Modified Frame Thick 7 x 11 Open Center (Instruction 84).
At the upper end of the Technic Liftarm Modified Frame Thick 7 x 11 Open Center we placed two Technic Pin 3Lwith Friction Ridges (Instruction 85) that will serve to hold two Technic Panel Curved 7 x 3 with 2 Pin Holes through Panel Surface (Instruction 86). On each of the Technic Panel Curve, we place two Technic Pin 2L with Friction Ridges (Instruction 87). On these, we place two Liftarm Thick 1 x 13(Instruction 88).
Then we place four Technic Axle 1L with Pin with Friction that will serve to hold the robot (Instruction 89).
To attach the color tool to the base we place four Technic Pin 2L with Friction Ridges(Instruction 90) on the base and on them we place two Liftarm Thick 1 x 9(Instruction 91).
For the color tool, we use a black Liftarm Thick 1 x 16 to which we put four Technic Pin 3L with Friction Ridges (Instruction 94) and we put four Liftarm Thick 1 x 3, each one of a different color: Red, Blue, Yellow and White (Instruction 95).
READY. We have finished building our robot.
Time to connect all the wires.
Step 13: Robot Wiring






Now we are going to connect the motors and sensors to the hub.
1.- Connect the right leg motor to the input "F".
2.- Connect the left leg motor to input "B".
3.- Connect the color sensor to input "D".
4.- Connect the distance sensor to input "C".
Step 14: The Code















To program the robot, follow these steps:
1.- Open the MINDSTORM application.
2.- Click on PROJECTS
3.- Create a new project (Click over +)
4.- Select Python as a new project.
5.- Select all the code displayed on the screen and replace it with the code from the text file that contains the robot code: Instructables Robot v1.0.txt.
6.- Turn on the Hub and establish the connection with the application (USB or Bluetooth).
7.- Download the program and ...
READY to play.
Attachments

Step 15: TESTING
Once the program is downloaded, it is necessary to test that all the functions work correctly.
Step 16: PHASE TWO - PAPER MODEL

We have finished building our Robot and have programmed it. Now is the time to build its exterior structure. For this, I have created a replica of the Instructables Robot in a paper model that fits the robot we have built. Let's build it ...
Step 17: Paper Model - Right Leg









1.- Download the paper model: Right Leg Papercraft.pdf.
2.- Print it on a 1:1 scale
The model is divided into two sections: front and rear
3.- Very carefully, cut out each model following the solid lines.
4.- For each model, mark the folds, folding the model along the dotted lines.
5.- In each model apply glue and carefully join the upper part of the leg to the body.
6.- IMPORTANT: Join the two halves only at the outer end of the model, so that you can place the paper model on the robot.
Attachments

Step 18: Paper Model - Left Leg







1.- Download the paper model: Left Leg Papercraft.pdf.
2.- Print it on a 1:1 scale
The model is divided into two sections: front and rear
3.- Very carefully, cut out each model following the solid lines.
4.- For each model, mark the folds, folding the model along the dotted lines.
5.- In each model apply glue and carefully join the upper part of the leg to the body.
6.- IMPORTANT: Join the two halves only at the outer end of the model, so that you can place the paper model on the robot.
Attachments
Step 19: Paper Model - Arms



1.- Download the paper model: Arms Papercraft.pdf.
2.- Print two copies on a 1:1 scale
3.- Very carefully, cut out each model following the solid lines.
4.- For each model, mark the folds, folding the model along the dotted lines.
5.- In each model apply glue and carefully join the parts.
Attachments
Step 20: Paper Model - Body



























1.- Download the paper model: Body Papercraft.pdf.
2.- Print it on a 1:1 scale
3.- Very carefully, cut out each of the six sheets of the model following the solid lines.
4.- For each model, mark the folds, folding the model along the dotted lines.
5.- In each model apply glue and join carefully shape the model.
6.- Watch the VIDEO to see the order of the pieces
7.- Join each of the pieces with glue, placing one by one and waiting for the glue to dry to continue with the next piece.
Attachments
Step 21: Paper Model - Head





1.- Download the paper model: Head Papercraft.pdf.
2.- Print it on a 1:1 scale
3.- Very carefully, cut out each of the two sheets of the model following the solid lines.
4.- For each model, mark the folds, folding the model along the dotted lines.
5.- In each model apply glue and join carefully shape the model.
6.- Watch the VIDEO to see the order of the pieces
7.- Join each of the pieces with glue, placing one by one and waiting for the glue to dry to continue with the next piece.
Attachments
Step 22: PAINTING

It is time to paint our Robot.
We will need a thick brush and a thin brush and acrylic paint in yellow, red, and black colors.
With a thick brush take yellow paint and paint all the paper models of the robot.
Depending on the paint you have, it may be necessary to apply more than one coat of paint, for that allows each coat to dry perfectly before applying the next coat.
Step 23: Painting the Legs




Step 24: Painting the Body



Step 25: Painting the Head



Step 26: Placing the Ears


Before painting the details, we are going to place the robot's ears.
1.- Take a black Axle 3L and place it on a red Plate Round 2 x 2 with axle hole
2.- Apply white glue on the Plate Round and glue it to the head.
3.- Do the same with the other ear
Step 27: Painting Details











It is time to paint the details of the robot.
1.- With a thin brush, paint the iris of the eyes red.
2.- Wash your brush and wait for the paint to dry.
3.- Take some black paint and paint the eyes black, being careful not to paint the iris red.
4.- Paint the eyebrow and mouth.
5.- Paint the details of the arms.
6.- Paint the details of the body: the front circles, the slit, and the lower part of the body.
7.- Finally, paint the details of each leg.
8.- Wash your brush and wait for the paint to dry before continuing with the next step.
Step 28: Covering the Robot - Legs











It is time to place the paper model on the structure of our robot.
Let's start with the legs.
IMPORTANT: The paper models of the legs are different, there is a right model and there is a left model. To distinguish them, you can follow the shape of the upper part, which is designed to fit the model of our robot.
1.- Carefully place the paper model on the robot model.
2.- Verify that it fits correctly
3.- Apply glue and hold the parts firmly together and wait a moment for the glue to dry.
4.- Repeat the same for the other leg.
Step 29: Covering the Robot - Body







1.- To place the paper model of the body on the robot, we first need to pass the cables of the distance sensor through the slot in the neck of the paper model.
2.- Carefully connect the sensor cable to port "C" of the Hub.
3.- Carefully adjust the paper model and allow it to rest on the paper supports that we build.
Step 30: Covering the Robot - Head





Finally, place the paper model of the head on the robot.
Step 31: Ready to Play

READY, we have finished our robot. Time to play with it.