

Introduction: V1 Rotary Encoder Using Attiny Microcontroller




i made a rotary encoder generator using attiny microcontroller which can be used for simulation in proteus and tinkercad as there no encoder wheel viable in them
v1 rotary encoder using attiny
Supplies
this are the list of materials required
Attachments

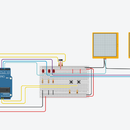
Step 1: Attiny Schematic


at here you see the connection you can use the .brd file in tinkercad

Step 2: Source Code
at here you can there is a simple code given for the attiny
// C++ code
//
void setup()
{
pinMode(4, INPUT);
pinMode(3, INPUT);
pinMode(0, OUTPUT);
pinMode(1, OUTPUT);
pinMode(2, OUTPUT);
pinMode(5, INPUT);
}
void loop()
{
if (digitalRead(4) == HIGH) {
if (digitalRead(3) == HIGH) {
digitalWrite(0, HIGH);
digitalWrite(1, LOW);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, HIGH);
digitalWrite(1, HIGH);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, LOW);
digitalWrite(1, HIGH);
digitalWrite(2, HIGH);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, LOW);
digitalWrite(0, LOW);
digitalWrite(0, HIGH);
delay(100); // Wait for 100 millisecond(s)
}
if (digitalRead(5) == HIGH) {
digitalWrite(0, LOW);
digitalWrite(1, LOW);
digitalWrite(2, HIGH);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, LOW);
digitalWrite(1, HIGH);
digitalWrite(2, HIGH);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, HIGH);
digitalWrite(1, HIGH);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, HIGH);
digitalWrite(0, LOW);
digitalWrite(0, LOW);
delay(100); // Wait for 100 millisecond(s)
}
} else {
if (digitalRead(3) == HIGH) {
digitalWrite(0, LOW);
digitalWrite(1, LOW);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, HIGH);
digitalWrite(1, LOW);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, HIGH);
digitalWrite(1, HIGH);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, HIGH);
digitalWrite(0, LOW);
digitalWrite(0, LOW);
delay(100); // Wait for 100 millisecond(s)
}
if (digitalRead(5) == HIGH) {
digitalWrite(0, HIGH);
digitalWrite(1, LOW);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, HIGH);
digitalWrite(1, HIGH);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, LOW);
digitalWrite(1, HIGH);
digitalWrite(2, LOW);
delay(100); // Wait for 100 millisecond(s)
digitalWrite(0, LOW);
digitalWrite(0, LOW);
digitalWrite(0, LOW);
delay(100); // Wait for 100 millisecond(s)
}
}
}
Attachments
Step 3: Link to the Circuit
https://www.tinkercad.com/things/co9FU5KTbk5







