

Introduction: 2-Wheel Self Balancing Robot by Using Arduino and MPU6050




2-Wheel Self Balancing Robot by using Arduino and MPU6050.
Use Arduino as the controller and sensor MPU6050 to control the balance. Just add a simple Serial Bluetooth module and use a Bluetooth Serial Controller APP for Android Phone to make the remote control.
In the first version, the controller is Arduino UNO, then in the sencond version as the following video shows, just change it to Arduino Lenardo.
Now let's see how to make this robot step by step.
Use Arduino as the controller and sensor MPU6050 to control the balance. Just add a simple Serial Bluetooth module and use a Bluetooth Serial Controller APP for Android Phone to make the remote control.
In the first version, the controller is Arduino UNO, then in the sencond version as the following video shows, just change it to Arduino Lenardo.
Now let's see how to make this robot step by step.
Step 1: Materials



Mechanical Parts:
3 × Acrylic Board
16 × Brass Stud M4x16
2 × Encoder Motor
2 × Motor Brakcets
2 × Shaft Coupling
2 × Wheel
Screw M3
Nut M3
Electronic Modules:
1 × Arduino UNO (Arduino Leonardo in the second version)
1 × Motor Driver L298N
1 × DC/DC Power Converter LM2596
1 × MPU6050
2 × 18650 2600mAh 3.7V Li-ion Rechargeable Battery
1 × Battery Holder
Step 2: Build the Frame





Install 3 Acrylic board together by using Brass Stud M4x16, Screw M3 and Nut M3 to build the frame.
Step 3: Install Motor Brackets


Install 2 Motor Brackets on the frame.
Step 4: Install Encoder Motors and Wheels







First, install 2 encoder motors on the motor brackets.
Then add 2 wheels on the motors.
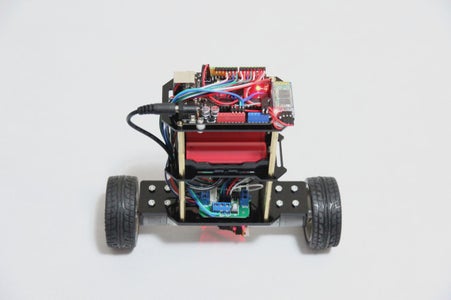
Step 5: Add Electronic Modules and Batteries on the Robot.










