Introduction: Ball/Human Following Robot


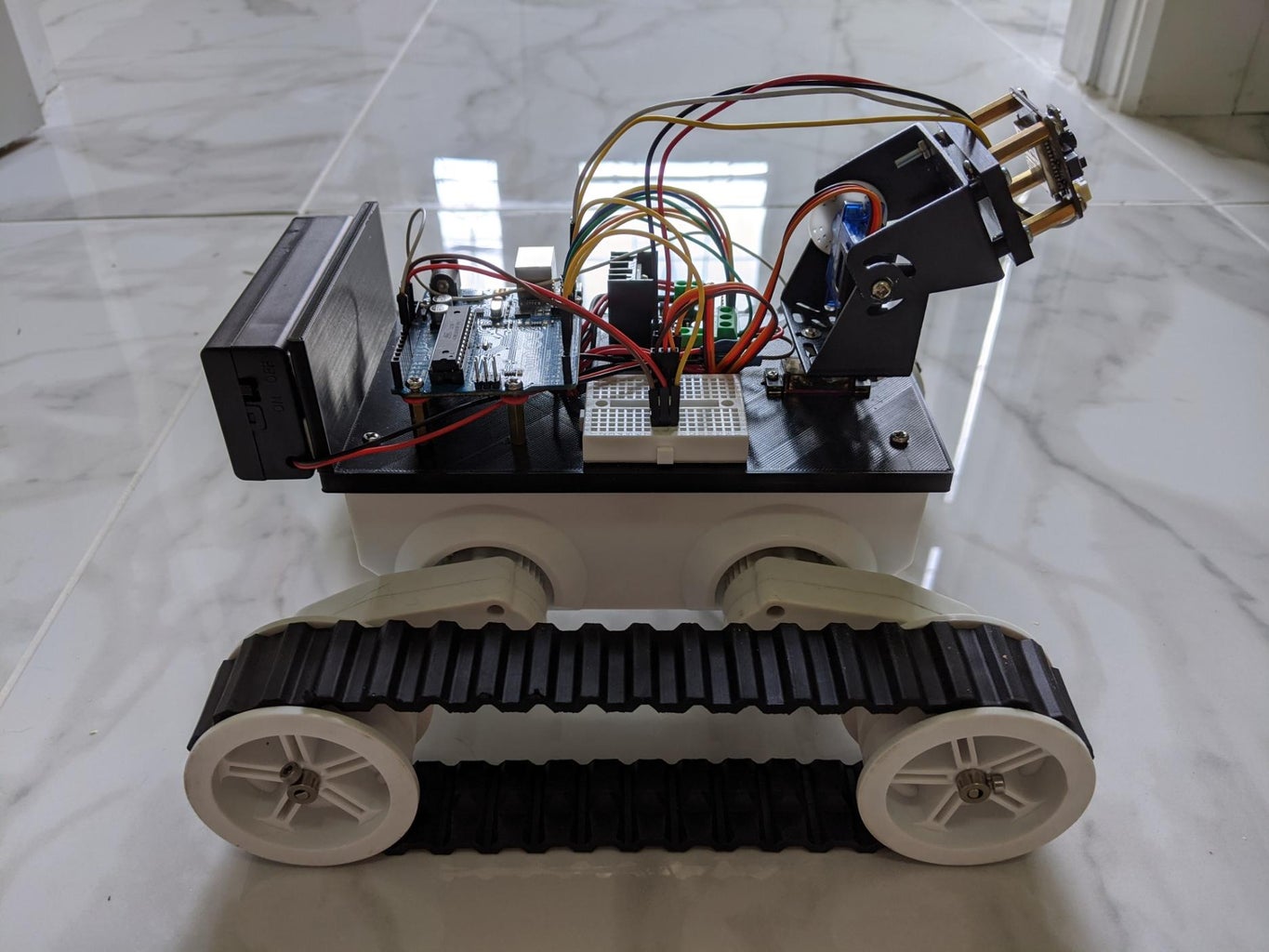


Here are some images of the robot and a video. The tracking is not perfect, I recommend you to try and upgrade my algorithm. It's not perfect but it works fine. I won't do a full step by step tutorial, but I give everything I used here. This is my first Instructables.
Supplies
Components list:
- Rover 5 chassis
- Arduino Uno
- L298N H-Bridge
- MU Vision Sensor
- 2x 18650 battery pack with switch
- 2x 18650 batteries
- Mini breadboard
- Tilt/Pan servo platform (I used one FS90 9g micro servo and one SG90S)
- Double sided tape
- Wires
- Different lengths M3 screws and nuts
- Short M3 standoffs
- Long male/male pins (optional)
- The 3D printed platforms I made (optional, if you don't have a 3D printer you can make your own platforms with something else)
Step 1: Here Are the Files for the 3D Printed Parts
Note that the Rover 5 platform I made really ins't perfect, the holes to screw the platform to the chassis aren't perfectly aligned, so you might have to force a bit to screw all 4 of them. Also, the hole for the servo might be too tight for some servos.


Step 2: Here Is the Code
Put the motor.cpp and the motor.h in the same folder as the main code.
MU Vision Sensor base code and explanations: https://wiki.dfrobot.com/MU_Vision_Sensor_SKU:%20S...
The motor library is from an OSEPP robot kit


Participated in the
Robots Contest






