

Introduction: Arduino Mini 2.4GHz and IR Remote Control System







This is my DIY remote control system. It was designed during the last couple of months. It's based on an Atmega 328P MCU and NRF24L01+ radio modules.
The software and board CAD data are available on my GitHub repo: https://github.com/TheDIYGuy999
Lots of videos are available on my YouTube channel: https://www.youtube.com/user/TheDIYGuy999
If you want to build your own remote, just upload the EAGLE .brd file on https://oshpark.com and exactly the same boards as mine will be delivered to you in a couple of weeks.
Of course, you can also use a standard Arduino board and wire it up in accordance with the schematic on GitHub.
Technical specification transmitter:
- Batteries: 4AA Alcalines or NiMh rechargeables
- 2.4GHz, 10 vehicle ID's
- LEGO "Power Functions" Infrared, blue and red channel, 4 groups
- MECCANO Infrared (A, B, C, D)
- 4 analog channels (2 joysticks)
- 1 analog channel (additional potentiometer connector on the right hand side)
- 2 digital "Mode1" & "Mode2" channels, integrated in joysticks)
- 1 momentary push button channel (for horn etc.)
- 0.96" OLED, 128 x 64 pixels
- Back channel for vehicle battery monitoring on the transmitter
- Configuration menu for servo travel and rotation direction adjustment (independent for all vehicle ID's)
- Automatic joystick zero point calibration during power-on
- Documentation on GitHub: https://github.com/TheDIYGuy999/RC_Transmitter
Technical specification receiver:
- Input voltage range 3.5 - 8.5V (be careful with your servos, they usually require 4.8 - 6V)
- 4 standard RC servo outputs
- TB6612FNG dual channel DC motor driver integrated, so you don't need an additional ESC for smaller models (two versions available, see step 3)
- Lots of vehicle software configuration options, such as differential steering for caterpillar models, headlights, taillights, brake lights, indicators
- I2C and Serial headers (can also be used for lights)
Documentation on GitHub: https://github.com/TheDIYGuy999/Micro_RC_Receiver

Step 1: Transmitter Assembly and Software Configuration:

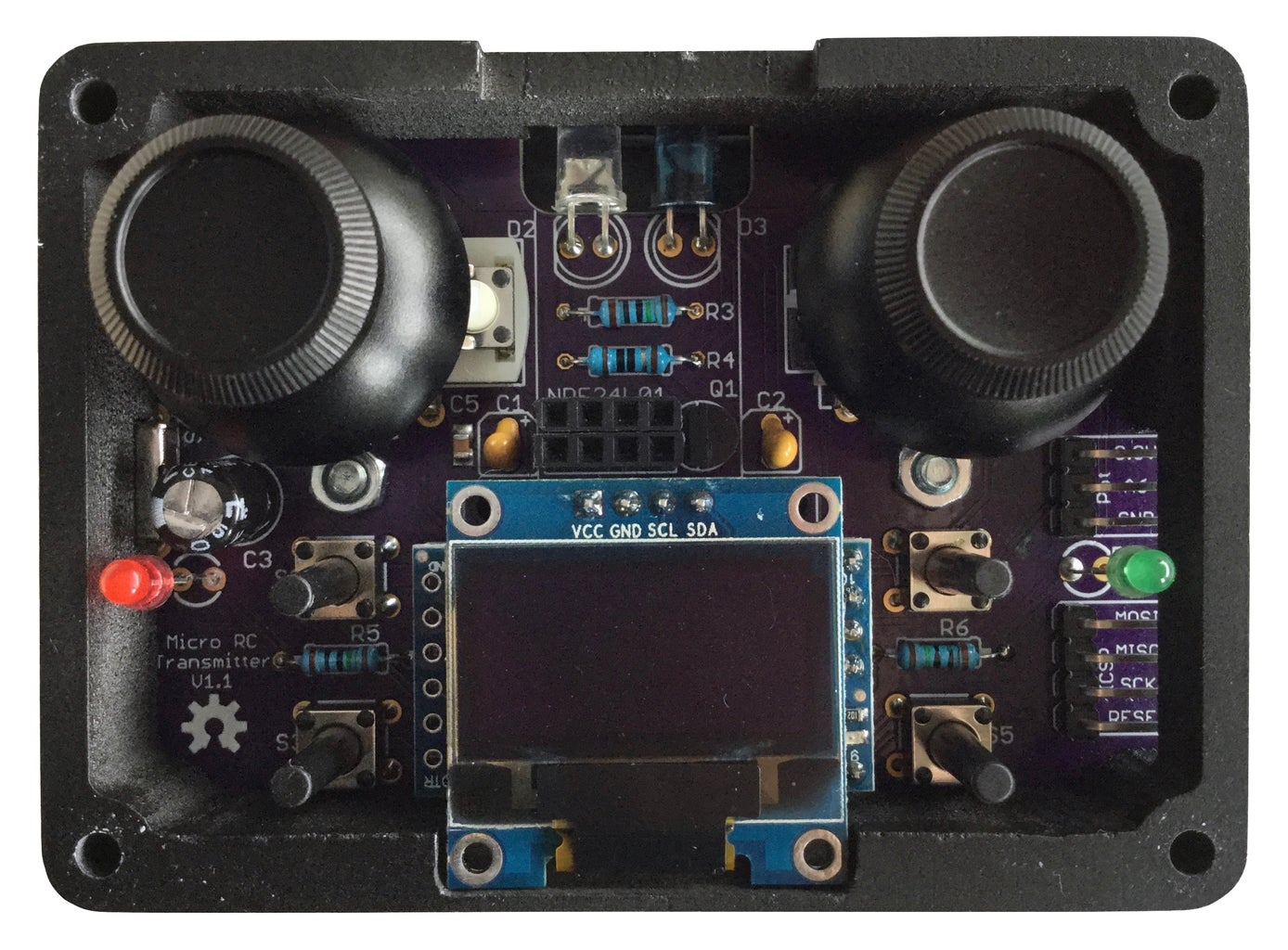


The easiest way to do the necessary steps is described in the videos above. The used stock material for the housing is black MDF for the frame and PVC foam plate material for the cover. For software upload, also have a look at the manual on the first page.
Step 2: Receiver Assembly and Software Configuration:
The easiest way to do the necessary steps is described in the videos above. The shot air soldering is shown in the Porsche video. After soldering, use a magnifying glass and have a close look for shorts between the pins! Some rework, using flux and the soldering iron may be necessary.
The used stock material for the housing is black MDF. The label is an Excel sheet.
Step 3: "High Power" Receiver Version
For bigger vehicles, you can use this receiver version. It has both TB6612FNG channels wired in parallel. That means, you can use a motor up to 2.4A (average) and 6.4A (peak)
Important: if you draw the maximum current during a longer time period, an additional heat sink is required. See the KD-Summit S600 video. Also important to know is, that a higher PWM frequency produces more losses and therefore more heat. The PWM motor 2 PWM frequency can be adjusted in the "vehicleConfig.h" If "HP" is selected in your "vehicleConfig.h", motor 2 is the driving motor and no steering motor is available!
Step 4: Steering: Original Motor or Servo? or Even a Caterpillar With Differential Steering?
You can reuse the original steering motor of cheap RC cars. In this case, it is wired to the motor 2 connector.
Or you can use a standard RC servo and wire it to the servo channel 1. Please note, that RC servos require a voltage of 4.8 - 6V. Use a voltage converter, if your receiver is supplied with a different voltage
No software configuration is required, because motor channel 2 and servo channel 1 are controlled in parallel.
The entirely different choice is the caterpillar mode with differential steering. Select "vehicleType" = 1 in "vehicleConfig.h" in this case. Axis 3 is then the throttle and axis 1 the steering of your caterpillar vehicle! The left track is wired to the motor 1 connector and the right track to the motor 2 connector.
Step 5: Headlights, Taillights, Brake Lights, Indicators
IMPORTANT! The maximum output current of all the mentioned pins is 20mA
You can add lights. They use the following pins:
- Headlights: RXI
- Taillights / brake lights (US style combination): servo pin 2 (additional driver in accordance with video required)
- Indicators: SDA and SCL
Note: you have to select the lights you want in your "vehicleConfig.h"
A momentary signal can be switched on the TXO pin (for example a horn)
Engine sound can be added in accordance with the video.
Step 6: Housing Milling Process Enhanced
The housing milling process was enhanced, using GRBL 1.1, UGS Platform and FUSION 360 CAD CAM
Step 7: How the First Prototype Looked Like and Thanks for Reading
I hope, that you've enjoyed this little instructable and that it was useful for you.
If so, please subscribe to my YouTube channel, thanks: https://www.youtube.com/user/TheDIYGuy999/videos







