

Introduction: Arduino and Processing Interact.




Arduino, processing and ultrasonic sensors to make a pages turner. It makes us can turn pages by waving hand.Ultrasonic page tunner is used to turn page on the computer.It is consist of 3 ultrasonic sensors and an Arduino UNO. It can help you turn page by wave your hand in front of the ultrasonic sensor.
Step 1: Materials

what you need:
Arduino Uno R3 x1;
ultrasonic sensor HC-SR04 x3;
ProtoBoard 7cm * 10cm - 2.54mm x1;
330 ohm ressitor x3;
LED x3;
Some dupont lines;
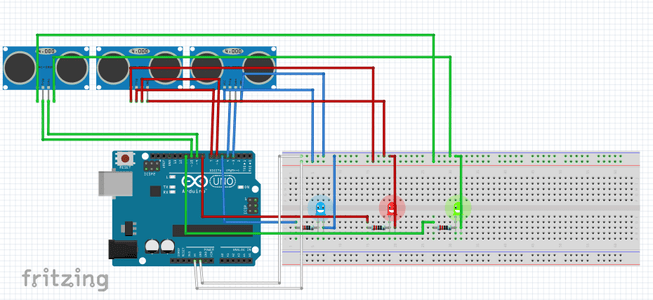
Step 2: Schematic


Connect the circiut on bread board and test the fountions.
Step 3: Put the Pictures in Suitable Situation.

You must put some images (JPEG, GIF, or PNG) into the sketch’s data before you test the circuit.
Step 4: Loading the Arduino Program and Processing to Test the Fountions
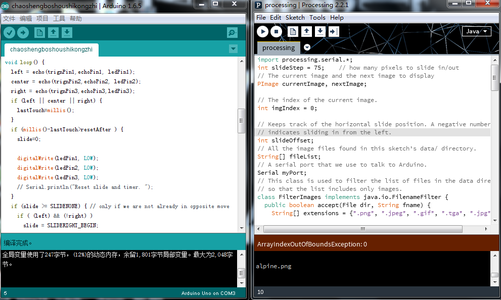
Here is the Arduino code:
copy and paste these code to Arduino IDE and load it to UNO
int slide = 0;
boolean left=false; boolean center=false; boolean right=false; int trignPin1=4; int trignPin2=7; int trignPin3=10; int echoPin1=3; int echoPin2=6; int echoPin3=9; int ledPin1=5; int ledPin2=8; int ledPin3=11; int maxD = 20; long int lastTouch = -1; // ms int resetAfter = 2000; // ms int afterSlideDelay = 50; //ms; all slides ignored after successful slide int afterSlideOppositeDelay = 500; // left slides ignored after successful right slide int SLIDELEFT_BEGIN = -1; // Motion was detected from right int SLIDELEFT_TO_CENTER = -2; // Motion was detected from right to center int SLIDENONE = 0; // No motion detected int SLIDERIGHT_BEGIN = 1; // Motion was detected from left int SLIDERIGHT_TO_CENTER = 2; // Motion was detected from left to center
void setup() {
Serial.begin(9600); // bit/s
pinMode(ledPin1, OUTPUT);
pinMode(ledPin2, OUTPUT);
pinMode(ledPin3,OUTPUT);
}void loop() {
left = echo(trignPin1,echoPin1, ledPin1);
center = echo(trignPin2,echoPin2, ledPin2);
right = echo(trignPin3,echoPin3,ledPin3);
if (left || center || right) {
lastTouch=millis();
}
if ((millis() - lastTouch)> resetAfter) {
slide=0;
digitalWrite(ledPin1, LOW);
digitalWrite(ledPin2, LOW);
digitalWrite(ledPin3, LOW);
// Serial.println("Reset slide and timer. ");
}
if (slide >= SLIDENONE) { // only if we are not already in opposite move
if ((left) && (!right))
slide = SLIDERIGHT_BEGIN;
if (center && (slide == SLIDERIGHT_BEGIN))
slide = SLIDERIGHT_TO_CENTER;
if (right && (slide == SLIDERIGHT_TO_CENTER))
slideNow('R'); }
if (slide <= SLIDENONE) {
if (right && (!left))
slide = SLIDELEFT_BEGIN;
if (center && slide == SLIDELEFT_BEGIN)
slide = SLIDELEFT_TO_CENTER;
if (left && slide == SLIDELEFT_TO_CENTER) {
slideNow('L');
}
}
delay(50);
}
boolean echo(int trignPin, int echoPin, int ledPin)
{
int d = getDistance(trignPin, echoPin); // cm
boolean pinActivated = false;
Serial.print(d);
if (d < maxD) {
digitalWrite(ledPin, HIGH);
pinActivated = true;
} else {
digitalWrite(ledPin, LOW);
pinActivated = false;
}
return pinActivated;
}
int getDistance(int trignPin,int echoPin)
{
long duration, inches, cm;
pinMode(trignPin, OUTPUT);
digitalWrite(trignPin, LOW);
delayMicroseconds(2);
digitalWrite(trignPin, HIGH);
delayMicroseconds(5);
digitalWrite(trignPin, LOW);
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
return(cm); // You could also return inches
}
void slideNow(char direction) {
if ('R' == direction)
Serial.println("F");
digitalWrite(ledPin1,HIGH);
if ('L' == direction)
Serial.println("B");
digitalWrite(ledPin3, HIGH);
delay(afterSlideDelay);
slide = SLIDENONE;
}
long microsecondsToInches(long microseconds) {
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds) {
return microseconds / 29 / 2;
}Here is the processing code:
copy and paste these code to Processing IDE run when UNO connecting with computer.
import processing.serial.*;
int slideStep = 75; // how many pixels to slide in/out // The current image and the next image to display PImage currentImage, nextImage;
// The index of the current image. int imgIndex = 0;
// Keeps track of the horizontal slide position. A negative number
// indicates sliding in from the left.
int slideOffset;
// All the image files found in this sketch’s data/ directory.
String[] fileList;
// A serial port that we use to talk to Arduino.
Serial myPort;
// This class is used to filter the list of files in the data directory
// so that the list includes only images.
class FilterImages implements java.io.FilenameFilter {
public boolean accept(File dir, String fname) {
String[] extensions = {".png", ".jpeg", ".gif", ".tga", ".jpg"};
// Don’t accept a file unless it has one of the specified extensions
for (int i = 0; i < extensions.length; i++) {
if (fname.toLowerCase().endsWith( extensions[i])) {
return true;
}
}
return false;
}
}
// This loads the filenames into the fileList
void loadFileNames() {
java.io.File dir = new java.io.File(dataPath(""));
fileList = dir.list(new FilterImages());
}
// The Processing setup method that’s run once
void setup() {
size(displayWidth, displayHeight); // Go fullscreen
loadFileNames(); // Load the filenames
/* This centers images on the screen. To work correctly with
this mode, we'll be using image coordinates from the center
of the screen (1/2 of the screen height and width) .
*/
imageMode(CENTER);
// Load the current image and resize it.
println(fileList[0]);
currentImage = loadImage(dataPath("") + "\\" + fileList[0]);
currentImage.resize(0, height);
println(Serial.list());
myPort = new Serial(this, Serial.list()[0], 9600);
}
// Go to the next image
void advanceSlide() {
imgIndex++; // go to the next image
if (imgIndex >= fileList.length) { // make sure we're within bounds
imgIndex = 0;
}
slideOffset = width; // Start sliding in from the right
}
void reverseSlide() {
imgIndex--; // go to the previous image
if (imgIndex < 0) { // make sure we're within bounds
imgIndex = fileList.length - 1;
}
slideOffset = width * - 1; // Start sliding in from the left
}
void draw() {
// Put up a black background and display the current image.
background(0);
image(currentImage, width/2, height/2); // Is the image supposed to be sliding?
if (slideOffset != 0) { // Load the next image at the specified offset.
image(nextImage, slideOffset + width/2, height/2);
if (slideOffset > 0) { // Slide from the right (next)
slideOffset -= slideStep;
if (slideOffset < 0) {
slideOffset = 0;
}
}
if (slideOffset < 0) { // Slide from the left (previous)
slideOffset += slideStep;
if (slideOffset > 0) {
slideOffset = 0;
}
}
if (slideOffset == 0) { currentImage = nextImage;
}
}
else {
// If we're not sliding, read the serial port.
if (myPort.available() > 0) {
char inByte = myPort.readChar();
print(inByte); // Displays the character that was read
if (inByte == 'F') { // Forward
advanceSlide(); }
if (inByte == 'B') { // Backward
reverseSlide();
}
// Load and resize the next image
nextImage = loadImage(dataPath("") + "\\" + fileList[imgIndex]);
nextImage.resize(0, height);
}
}
}Step 5: Design and Assemble the Shape


My design is not looking so good. I will design a better shape next time.
Made by Xie weifang from i-element.org
