Introduction: Arduino Obstacle Avoiding Robot






This is a robot that isn't hard to build and is awesome to show friends.
Step 1: Parts




you will need:
l293d motor drive shield
arduino uno
hc-sr04 ultrasonic sensor
two 1:120 gear ratio motors
a platform of some kind
different types of dupoint wires
a battery (9v preferred)
a servo
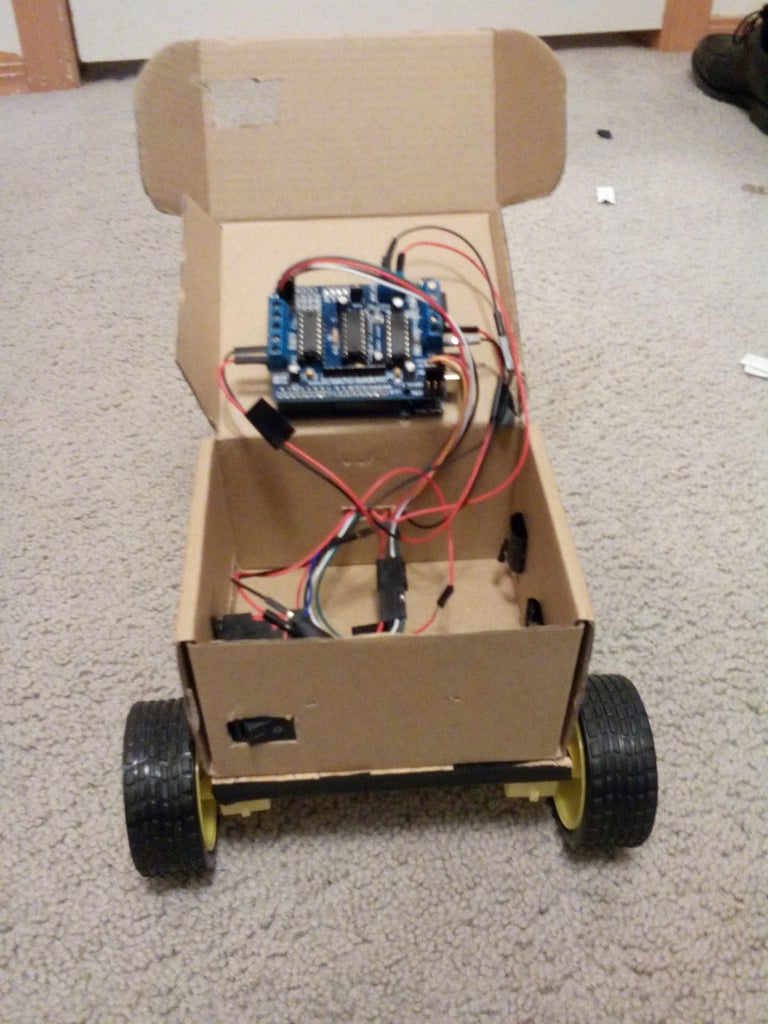
Step 2: Start Assembling


Attach the wheels to the bottom of my he platform.
attach servo
mount the sensor on the servo
mount l293 on the arduino
attach wires for the motors
attach servo to the servo port
solder wires into 5+, gnd, a4 and a5
connect 5+ wire to vcc on the sensor
connect a4 to trig
connect a5 to echo
connect gnd to gnd
Step 3: Add Code
you can make your own code for this or download it here
http://apcmag.com/arduino.htm#project4
its project 4 mini robot
be sure to install the libraries :-)