

Introduction: Critter: 3D Printed Crawling Arduino Robot





The Critter is a 3D printed Arduino controlled crawling robotics kit. It was created by Slant Concepts as part of the LittleBots Robotics Kits project.
The Critter robotics kit is designed to be controlled from an Android bluetooth app that can work on phones or tablets. The app allows you to "drive" the Critter and control functions such as Dance and Autonomous Mode.
The Critter was created in order to introduce robotics beginners to the most basic components of walking robots and how they work. Since the Critter is a crawling robot there are few complexities and pitfalls when compared to other walking robots. It won't fall over, and it is simplier to go into the code and change the gaits of the robot.
Even the Bluetooth app was created with MIT app Inventor so that beginners can replicate and build on the app.
If you would like a video version of this tutorial you may watch it here.
Step 1: Parts List

The Critter can be purchased as a kit or you can order the individual mechanical and electrical parts and 3D print the rest yourself.
Step 2: Attach the Servos




- Press the Knee Servo into the slot on the Critter Upper Leg
- Insert the Shoulder servo into its rounded space on the Upper Leg and secure with mounting screws
- Repeat for the other Upper Leg.
- Feed the Knee Servo wire though the organizing loop.
Step 3: Attach the Foreleg





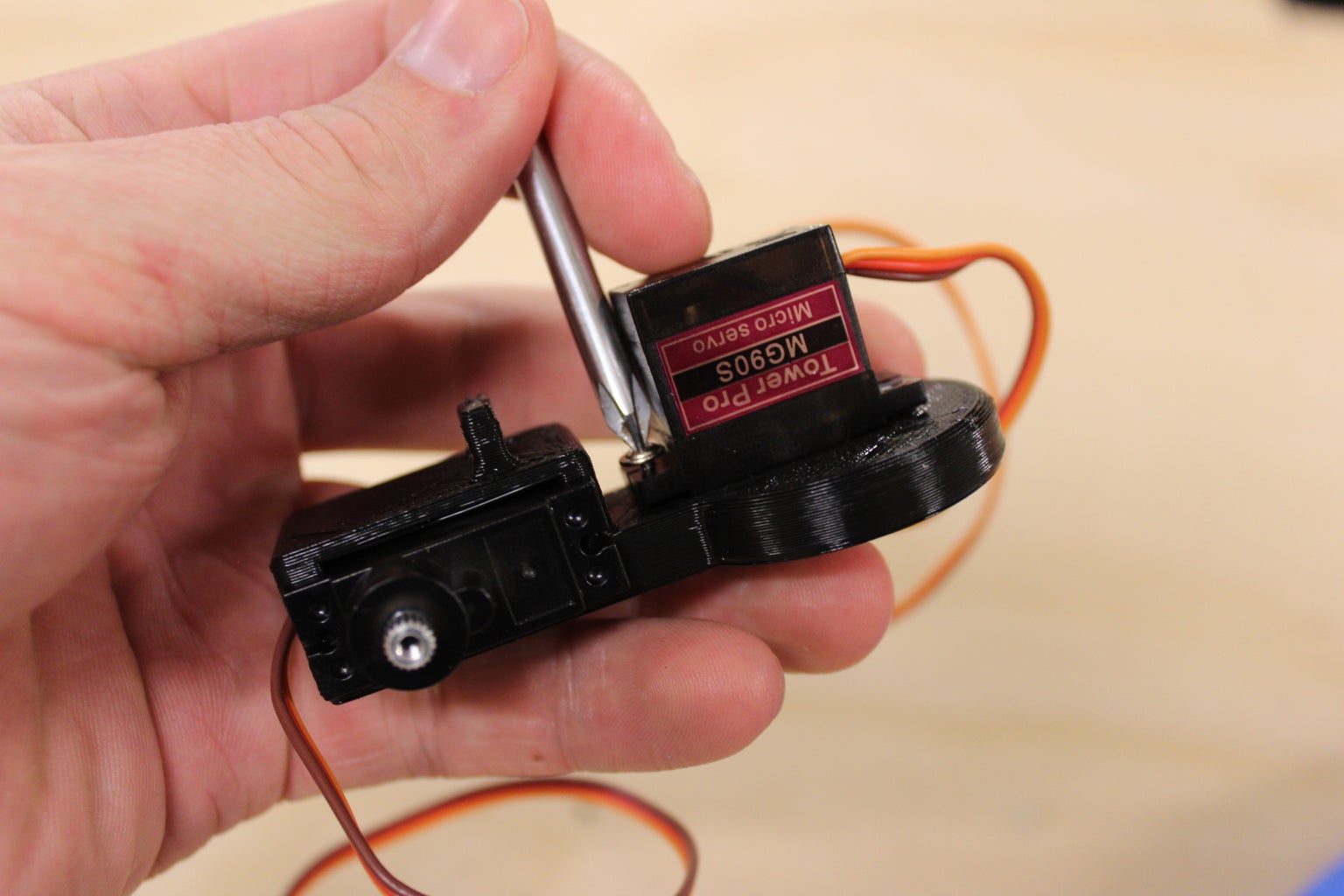
- Rotate the Left Knee Servo fully Clockwise using a spare servo horn
- Press the Foreleg onto the servo. Start with the armature side then twist it onto the rotation nub.
- Position the foreleg so that it is about 70-80 degrees with respect to the Upperleg
- Secure the foreleg with a servo horn and screw it in.
Right Leg
- Rotate the Left Knee Servo fully Counter-Clockwise using a spare servo horn
- Press the Foreleg onto the servo. Start with the armature side then twist it onto the rotation nub.
- Position the foreleg so that it is about 70-80 degrees with respect to the Upperleg
- Secure the foreleg with a servo horn and screw it in.
Step 4: Attach the Legs to the Base







Ensure that when you are placing the legs the knee servo armatures point inwards. This denotes the right and left leg.
Left Leg
- Rotate the shoulder Servo fully Clockwise
- Press the left into the shoulder Socket on the base
- Position the Leg so that it faces fully forward
- Secure with a Servo horn
Right Leg
- Rotate the Shoulder Servo fully Counter-Clockwise
- Repeat steps 2-4 of the Left Leg
Wen completed the Legs should both be facing forward, and not be able to bend any further inward.
Step 5: Attach the Board to the Base


Use the Board Mounting Screws to Attach the Meped Board to the Critter Base.
Check to make sure that the Board power switch is turned to "ON"
Step 6: Prep the Shell




- Press the Ultrasonic Sensor into the Shell
- Attach the Battery pack to the shell so that its power wire extends out the lower-left corner of the slot.
Step 7: Wiring Diagram



- Attach the servos a detailed by the diagram above. Remember that Orange or Yellow or White are always the signal wires on the Servo. Red is Positive. Black is Negative.
- Use the Jumper wires to connect the Ultrasonic sensor to the Board. Make sure that the labels on the sensor correspond to the labels on the board for each wire.
- Make sure that the Meped board power switch is Turned "ON"
Step 8: Upload Code

Here is a link to the LittleBots Downloads page. Find the latest Version of the Critter Arduino .ino sketch file and upload it to the board using thee Arduino IDE. (Note: Do not have the bluetooth module plugged in when you upload the arduino sketch via usb. Bluetooth and USB interfere with each other.)
Step 9: Add Batteries and Power Up
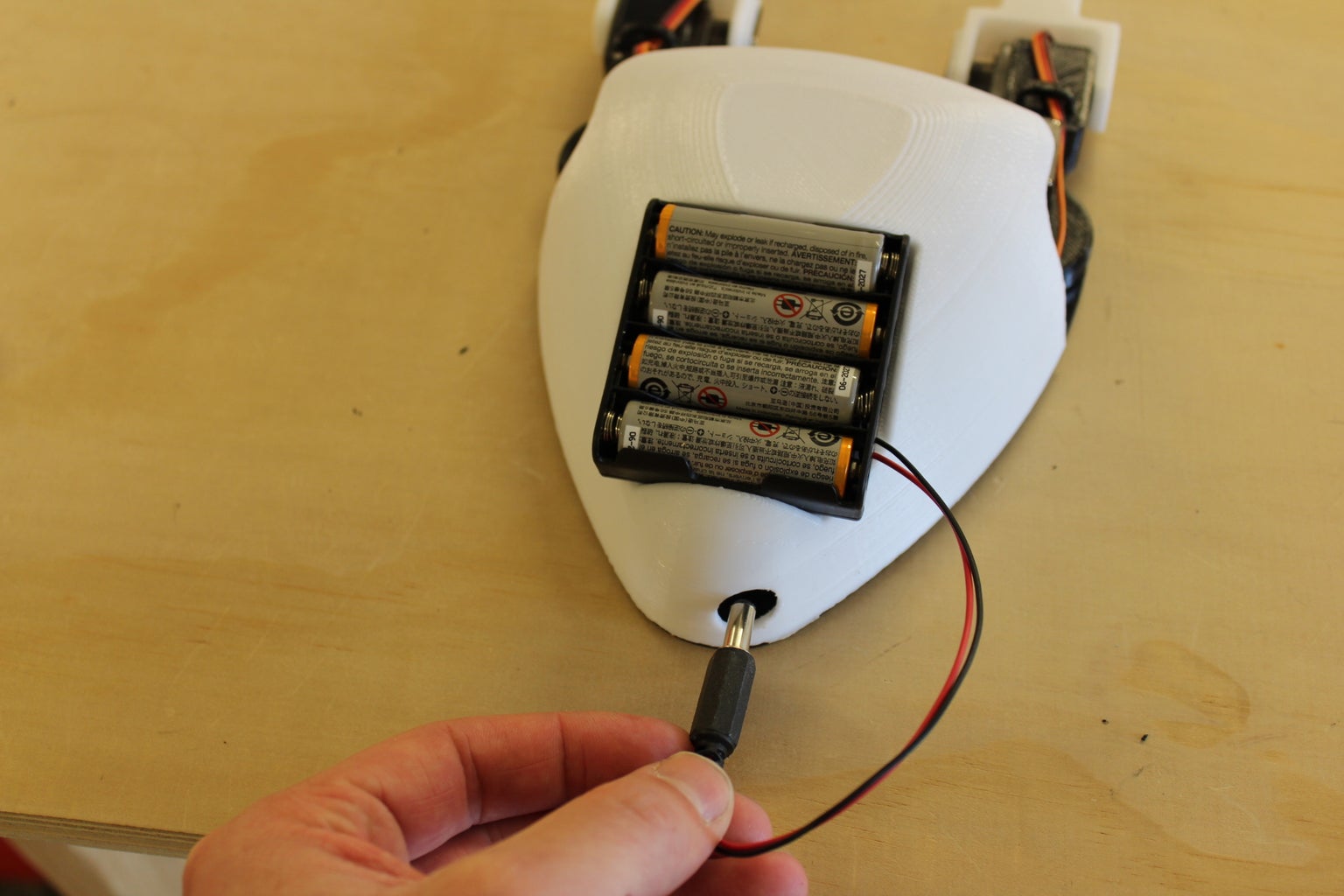
Add Batteries and Power on the Critter by Plugging in the Battery Module.
Step 10: Connect the App

Download the App from the Google Play Store.
Follow this video for details on connecting any Littlebot to its app.
- You must first pair your device to the Critter Bluetooth module
- Open the app and connect Bluetooth by selecting from the Bluetooth Menu
- Then you can control the Critter. Above is a diagram showing what the various functions of the app are.
Step 11: Calibrate the Critter


Once the app is connected you might notice that some of the servos are out of alignment.
To test and adjust, hit the "Stand" button on the app. When pressed the Critter should move into the position shown on the photos.
If a joint is out of alignment then remove the servo horn of the joint and move the part into the correct position. Then reattach the horn.
Repeat this for each joint until the Your critter aligns closely to with the one in the picture.
You Critter does not have to be exactly the same, but the calibration is necessary to make sure that each function in the code move the legs to the correct positions.
Step 12: Optional Step: Upgrades



The Critter can sometimes have difficulty operating on some smooth surfaces. There are two upgrades you can use to improve this performance
- Hot glue the small wheels to the back of the Critter so that there is less friction from dragging along.
- Apply hot glue (or some other high friction material) to the feet of the Critter so that they can grip the ground better.
Step 13: Enjoy Your Critter

That is all there is to it. Add some batteries and enjoy your Critter.
Check into the LittleBots website for projects and software.







