

Introduction: DVD to Laser Engraver







Hello everybody !!
This is my very first instructable, i've been in this page for a couple of years now, and this is the first BIG project i tackle on, so i decided that after i finish it i was going to publish it so, here it is!
My name is Aoshido and i come from Argentina, if you like to know more about me, check my profile, because this instructable is not about me (sadly) but about the Laser Engraver i built. So without further ado , here's how it goes!
2016-03-24: Dear god, 30000 ViewsI can't believe it!!! Thanks a lot for the support guys, and i hope you're voting for me on the contest~!!!
Step 1: Picking Up the Materials and Tools !






Here's a short list of materials:
Mechanic:
- DVD-R, from these we're going to salvage:
- Laser Diode
- Linear movement modules
- Screws
- The cases
- Plastic
- (Optional) 90° Braces
Electronic:
- Arduino Uno or NANO
- EasyDriver (x2)
Tools:
- Common electronic tools (Pliers, Screwdrivers, Soldering iron, etc)
- Dremel
- Bubble level (Or similar)
Step 2: Taking Apart the DVD Burners
















This is the fun part, taking everything apart!
This is really easy i'll explain over here the general steps and let the photos do the work:
- First you need to put something strong but thin (Like a needle, or a strong clip) in the hole that the DVD drives have on the front, not the big hole (the jack for audio), the little one. It needs to be strong because some drivers maybe jammed or just don't want to cooperate.
- If everything went fine, the tray should pop open. Here i recommend taking the lid of the tray so you can take the whole front out as shown in pictures 3 and 4. To take the lid off you need to push it slightly upwards and away from the driver. It has little grooves that you can see inside to guide where you need drive your force
- After that if you take the bottom screws the whole case should come off (Picture 5) and you'll be left with 2 parts: A plastic mechanism and a metal case. Put the case away for now, and save the front of that driver that you just took.
- Now what you see in pic 6 is the core of all this. This linear movement modules (From now on LMM) are our future X-Y and maybe Z Axis. To get this out you need to remove all the ribbon cables attached to them. Ribbons have their unique way of being attached , some have little locks that you need to flip up, others you need to flip the locks to the "front" (like if you opened a drawer), other just the blue tape that you need to pull and the whole ribbon comes right off.
- After that unscrew all the screws and then you need to pull it upwards like shown in picture 11, it has little rubber supports so you'll feel a little resistance, but its ok. This aluminum structure that you have now has a little carriage where the laser diode is in. This carriage varies a lot from model to model so you'll have to see for yourself how to take it apart, its not very easy but not very hard, sadly i didn't took any pictures of me doing it because when i found out how to take the diode i've already dismantled it the whole thing. Try NOT to break the (plastic/sometimes metal) carriage since that is going to be the support to move the axis.
- But wait, There's more! There's still a little DC motor that's in charge of opening and closing the tray, along with a (sometimes optical sometimes mechanic) endstop, and a led, so feel free to salvage those as well. To remove the DC motor you first need to take the leash off as shown in the last picture.
Step 3: Testing the Loot!






Now , from each driver you should've obtained
- 1 LMM (Linear movement modules with STEPPER motors)
- 1 DC Motors
- 1 DVD laser diodes
- 1 Full Case (Front, bottom plate, and the back case)
This is a great time to test if they actually work, because dismantling is a lot of fun, but we're here to create!
Now to test the LMM, you can only move them with your fingers and see if they run smoothly, you'll notice that if you run the carriage the way of the thread of the motor it spins the motor and the carriage runs butterly, but , if you run it the other way it does a clack-clack-clack and jumps the threading of the shaft of the motor. It's okay, it doesn't mean its broken, only that we're moving it from where we shouldn't, so just check that isn't broken anywhere and that it goes from bottom to top.
In order to test the whole LMM we need the electronics part working so we can now only check that the steppers are ok and hope that they work. To check the steppers you need to put your tester/multimeter in the resistance setting (The one with the Ω [OHM]) and measure between 2 pins of the stepper. Go with pairs you need to find 2 pairs of pins with a little resistance (usually between 6 and 10 Ω, being the most common 6Ω and 8Ω). Once you find them mark them. (You could solder the ribbon cable now if you want too!).
Now you should have 2 LMM that run well and have their motors identified, these ones are going to be our new XY Axis!
Step 4: Building the Structure


















This, this right here is the big step, this was the time consumer for me.
The structure in itself isn't very hard, but it has to be precise in order for the laser engraver to be precise as well. So i spent a lot of time watching if it was square or not, if it was leveled etc. I really recommend doing that because the results are great after, i get REALLY precise images, basically i get what i put on the pc.
Now for the base structure i put to cases on top of each other on a L shape, i got one that had a fat bottom (no pun intended) in order to sit flush on top of the other one. After i re-checked that they sat square to each other, i drilled a couple of holes on the fat base of the top one, that went straight thru the one in the bottom, and put a couple of screws there. After i put the nuts on the screws the structure was quite sturdy.
After that i measured how much space i had left for the LMM and marked it as shown in picture 1. Then i grabbed one of my modules and marked where the holes should be and drilled them. I Placed my LMM very close to the "X case" almost touching it, because the part that moves sits quite away from that wall so there's no problem.
From here i secured the Y axis to the Y case, checked several times that it was leveled (Pictures 4,5) and measured where the X LMM would sit on its case so they cover each other movements. After that i just repeated the process for the X Axis.
When the 2 axis where on place, i started building the plates that will hold the Laser (X Axis), and the material to be engraved (Y Axis). You can see on the pictures 10 to 15 how i designed the plate for the laser. Basically i picked a long piece of wood and glued it to the Y Axis carriage. Be careful about gluing this parts to the carriage because i did the same on the X axis and had a lot of troubles as you will see on the following steps. On the Y Axis there were no problems gluing because it had to withstand little weight. So i put on top of that wood another one of the same length but with lot of holes in order to reduce weight and, being able to grab different types of laser modules with easy exchange between them.
For the Y Axis platform, i did a similar piece of wood the one from the X Axis and glued it to the carriage, then on top of that one placed a square one, and in top of that one i placed another square one (this one made of metal). I used this layout because, i needed a small piece in order to glue it to the carriage but i wanted a big space so i needed a "buffer" piece in order to do that. Later i found out that i could've built a piece in a kinda of stretched X Shape in order to do this whole thing with just 2 pieces, the X one and the rectangular one. If i have some free time i'll upload it later.
When you have built both platforms, put everything on place and see if its square like in the last picture, if it is, Great! If it's not (it happens to us all), see how much of a difference you have, if its little (but beyond tolerance) add washers until falls within tolerance. If the difference its too big that you cant save it with washers, see if adding springs with the screws helps you level everything.
Now that we have a sturdy structure, lets go dig into the electronics!
Step 5: Electronics!

















This part is relatively easy, it's divided in this little steps:
- Prepare the motors
- Load the software into the Arduino
- Test the Arduino + drivers + motors
Prepare the motors
Most of these motors have 4 wires corresponding to 2 coils, so we have to find which ones correspond to which coil. We've done this in STEP 3, but i'll just quote myself how to do it now:
To check the steppers you need to put your tester/multimeter in the resistance setting (The one with the Ω [OHM]) and measure between 2 pins of the stepper. Go with pairs you need to find 2 pairs of pins with a little resistance (usually between 6 and 10 Ω, being the most common 6Ω and 8Ω). Once you find them solder the ribbon cable and leave the other end with bare wire for now. You can ,if you want, solder pinheaders temporally in order to be able to put them in a breadboard.
I'll include in this step the NEED for an external power supply, as you may have noticed it, the easydrivers have an input for a separate power supply for the motors. This is because the arduino CANT handle the current that the motors handle, nor the voltage. In this case this motors work fine with 5v and 12v (They heat a lot faster so beware), still you need an external powersupply because they draw much more current than the arduino.
Load GRBL into the Arduino
First of all, when i first plugged in my arduino NANO my computer didn't recognize it, i have no idea why, it needed some set of specific drivers for the nano, so i had to search for them. These ones worked for me, im on Windows 7 64 Bits.
2016-03-24:
The original Nano has a standard USB chip that's recognized by Windows. But a lot of the Nano clones (the ones that only cost a few bucks) use a different interface chip called a CH340 that's much cheaper but isn't recognized by Windows--so you have to find and load drivers for it. Usually it's no problem but I've seen reports that some brands of laptop just never recognize the chip even with drivers.
Thanks TimothyJ999 for the insight! I've also added the driver to this step, if you need it and can't find it! its the CH341SER rar file!
Now we need a software to control the easydrivers in the arduino, and some kind of interface with the computer so we can send the GCODE of the thing that we want to engrave.
For the software i've used GRBL 0.9f, heres the link to the git proyect so you can download it
When you download the files from the GRBL git Proyect you'll see that you end up with a bunch of folders like in my last photo. They all work, but have little enhancements or changes here are the most important things that you need to know:
- Those folders that say Arduino UNO will also work with arduino NANO since they share the same pinout
- There's a major change in the versions >0.9f and that is that they added a spindle speed variation Pin (this is used if you want to modulate the pulse to your Laser so it doesn't draw a lot of current, or if you want to control the speed of a rotary tool, like a dremel) This is important because in the prior versions this pin was called "Spindle enable" and it was on a different PIN, so be careful.
The pinout for the arduino NANO i read it on this instructable https://www.instructables.com/id/GRBL-Pinout-Arduin...
For the interface i'm using this one named GRBL Controller 3.6.1, i don't recall where i downloaded it, but its free, so look for it.
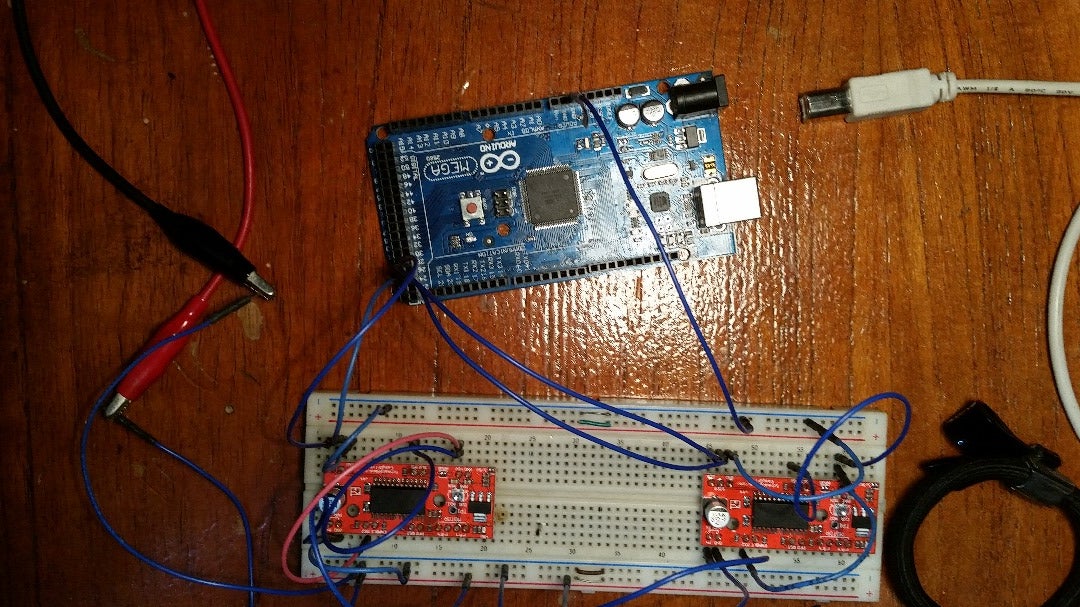
Test the Arduino + drivers + motors
Now its time for our very first test!! This is when we see if our baby moves, or if we created an abomination. You don't need to do this steps like this, but i've found out that this order minimizes the chances of burning anything so, feel free to follow it!
- Plug in the motors to the EasyDrivers
- Plug in the External Power suplly to the EasyDrivers but dont turn it on yet.
- Connect the EasyDrivers to the arduino
- Power on the external power supply
- Connect the arduino to the PC
- Open and Connect the GRBL software
You should see something like this:
$0=10 (step pulse, usec)
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=6 (dir port invert mask:00000110)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
.............
This is the configuration for your machine, with the default values so, before we send some commands be careful, we haven't configured anything about the steppers , so with these values its very likely for our axis to move a lot more than what they should and in different directions. So if your structure is fragile, or the motors are skip this step and do the configuration first. If you just want to see them move then send some commands !!
If you did everything right, it'll move, really fast and probably not in the direction that you told it to move (For example you tell the X axis to advance 1mm and it goes the other way 100mm). Don't Fret ! We haven't fine tuned anything yet!
In order to callibrate it properly, you can use this page:
https://github.com/grbl/grbl/wiki/Configuring-Grbl...
Here's my final configuration:
$0=43.300 (x, step/mm)
$1=43.300 (y, step/mm)
$2=43.300 (z, step/mm)
$3=200.000 (x max rate, mm/min)
$4=50.000 (y max rate, mm/min)
$5=50.000 (z max rate, mm/min)
$6=200.000 (x accel, mm/sec^2)
$7=50.000 (y accel, mm/sec^2)
$8=10.000 (z accel, mm/sec^2)
$9=50.000 (x max travel, mm)
$10=50.000 (y max travel, mm)
$11=200.000 (z max travel, mm)
$12=10 (step pulse, usec)
$13=0 (step port invert mask:00000000)
$14=0 (dir port invert mask:00000000)
$15=25 (step idle delay, msec)
$16=0.020 (junction deviation, mm)
$17=0.002 (arc tolerance, mm)
$19=0 (report inches, bool)
$20=1 (auto start, bool)
$21=0 (invert step enable, bool)
$22=0 (invert limit pins, bool)
$23=0 (soft limits, bool)
$24=0 (hard limits, bool)
$25=0 (homing cycle, bool)
$26=0 (homing dir invert mask:00000000)
$27=25.000 (homing feed, mm/min)
I calculated the values for :
$0=43.300 (x, step/mm)
$1=43.300 (y, step/mm)
$2=43.300 (z, step/mm)
Like this:
- Put a number in the neighborhood of what you think it might the correct (for example 50 steps/mm)
- Send an order to move the axis a fixed amount (for example 10mm)
- Measure how much the axis really moved, (for example, the axis moved 15mm)
- Calculate the error this way : e= (desired movement / real movement) (in this case e= 0.666....)
- Multiply the error that you got, with the original number, (in this case 50*0.666...=33.333...)
- Repeat with the new value (33.3333) and adjust until satisfied.

Step 6: Creating the Laser Module (with Driver)
















Remember how we found and identified the diode when we were taking the DVD drivers apart? Well now it's time to salvage that diode from the carriage.
Beware:
This types of lasers are usually class 2-3 read it on the case of your DVD driver to know more. What does it means? Well for this classes it's HAZARDOUS to watch it directly. Also, we're using this laser to engrave wood, melt plastic and more, what do you think it can do to your eyes? Please be careful.
More info on laser safety:
https://en.wikipedia.org/wiki/Laser_safety#Classif...
Now, as i said before, carriages vary a LOT so feel free to hack your way thru until you get the diode, but don't break the carriage cause that's where the plates are mounted!
Once you got a hold of it, it can look like picture 1,2,3, there are lots of diodes, and lots of pinouts, so beware when you look up in the internet for laser diode pinout, because i thought that they all shared the same pinout and then i found out they didint, like in picture 4. But by that time i had already burned like 5. In the end i found a diode like the one from the last picture that worked fine.
Now, when you have the correct pins, solder some colored cables to them, isolate them with some shrinking tube, or tape, and then if you are totally sure put a drop of hot glue or something to add a little bit of toughness.
I don't have it pictured but i got a cheap laser that had a similar module to the "Aixiz module" that is so popular, and disassembled it and put my diode with my cables in it. Before you close the module, be sure to tie a knot to the cables so if someone pulls the cables the strain is done to the knot and not to the soldering!.
Step 7: Designing and Building the Mainboard





















This step even thou it has a ton of pictures if quite easy if you ever designed and built a board before. If you haven't and you have no idea probably its going to cost you a lot to design it, not to build it because that's quite straight-forward. But if you have little knowledge of electronics it's really hard to come up with a decent design. If you do decide to design it yourself, bear in mind that the pinout for the arduino nano its the same that the one in the arduino uno, here's an instructable about it https://www.instructables.com/id/GRBL-Pinout-Arduin...
That being said, i'll attach my final design in eagle (it has a little module that is the Laser driver), if you do use it, please dont erase my name!
To design this i thought to make all modular, a module for the laser driver, each easydriver is a module on itself, and then the arduino is the last module, so the board only needed to connect the modules with each other. Later i saw that the Ramps board does something very similar, it has a slot for the arduino a slot for each driver etc etc, so it was a quite a nice surprise when i found out.
How to build a board:
There are a ton of better instructables over here about how to build them, so i'll just lay out the overall steps on how to do it, and let the images do the work. Although if you have any doubts feel free to ask them!
- Print your design on glossy paper, it doesn't matter the grams of the paper. Thin paper is good (not REALLY thin thou)
- Now polish your copper board, use a steel wool, that has thin threads. It needs to be mirror polished.
- Clean the board with alcohol and don't touch it with your fingers.
- Paste the printed design on your board with the printed side touching the copper side of the board. Use as little tape as you can to paste them
- Preheat an Iron to the max (usually its the setting for Jeans), when its hot enough, press the iron firmly for a couple of seconds on the design.
- Move the iron slowly around the design until you can see it from the side that you are ironing
- Drop it on water and let it rest for a while. Move it from time to time
- When the paper starts to peel, carefully help it with your fingers or a very soft toothbrush (Not used of course)
- When you peel the paper, it doesn't matter if it breaks or if it comes out in one piece (which is great) its very important to check if the design transferred it correctly. This step is crucial because a couple of minutes invested here in inspection can save you a tons of hours later on rework. Check if everything has transferred and if it hasn't remark it with a permanent marker. If a big % of the design didin't transfer, like 20%, then just polish up , and do it again.
- After you checked that everything is how its supposed to be, drop it on the acid !! This acid its not very dangerous to the skin but you need to wear proper protection like gloves and such. It can be lethal if ingested or inhaled etc etc, so again, beware.
- If the acid is very new (you haven't used it for other boards) you should see little bubbles forming up, I don't know whats the chemical reaction that's happening but its so aggressively eating the copper that its releasing bubbles, so keep an eye on it.
- To further speed up the process you can heat a little the acid, or move it constantly, or put bubbles in it, like with a fish tank.
- When the uncovered parts have no more copper, take the board, clean it a little and see if it has ate all that it had to eat and nothing more. If there are some parts that still have copper, dip it again in the acid and watch it closely. If overate some routes, well, it depends on the damage, if its a veeeery small track maybe you can bridge it with a little string of copper wire and solder, but its not very easy. If it ate a lot of tracks, you'll have to do it again :(
- If everything went ok, its time to drill all those little holes, be careful when drilling
- Now that we have our copper tracks and holes drilled, you can put a """silk mask"""" if you want the same way before polishing the tracks. I do this because it looks really professional. Just line up the silk mask with the holes drilled and do the same ironing+water again.
- After this, polish the now transferred design and put a layer of flux on each side to protect the copper from rust and such. Let it cure.
- Check for continuity in very close tracks or places that raise you suspicion. See if tracks touch each other now because if you found out when you plug it in and you see that foul smoke, its too late
- Now all that its left is to solder the components from smallest to largest so they don't move when we solder them. And Voila! we have our board!
Attachments
Step 8: Software, First Test!








By now we have our pretty sturdy machine, with the firmware on the arduino and the software on the computer, its time to learn a little bit on how to use it and how to calibrate it!
I strongly recommend if for this tests you can attach a marker of some kind to the machine instead of a laser, because its much more visible the flaws or deviations. Also you can watch it without goggles or anything.
Now first of all, we plug in the aux power supply, and the USB from the arduino to the PC then, we open our GRBL Controller and we choose the right port and Baud Rate (this we can look it up when we downloaded the GRBL firmware for our arduino, the default is 115200) hit Connect, if everything is ok you should see the machine configuration again as we saw it on the tests for electronics.
Now now, to manually move this machine is really funny and everything....... for about 10' after that we want to put some images to engrave! In order to do this we're going to need a couple of things:
- A software that can send GCODE to the machine(we have that one already, its the GRBL Controller)
- A software that can transform an image into a path (i use GIMP)
- A software that can transform PATH to Gcode (I use an extension for GIMP)
- An image
Now, the only thing hard to find is the software that transforms path to Gcode, i use the one that this instructable uses (as a matter of fact i used a lot of stuff from this instructable haha):
https://www.instructables.com/id/Pocket-laser-engra...
After that, what i do is this:
- Create a new image in gimp that is 43 x 43 mm
- Open an image in gimp (preferably Lineart, for example, pusheen lineart, slayers lineart, etc)
- Resize the image to fit the gimp canvas
- Right click the image and press "Trace BMP"
- This is the part where if you chosed a lineart image you wont have any problems
- Tweak the levels until you're left with a vector that fits your needs
- Select that vector and press in the path tab "Object to path"
- Select from the extensions "Laser Engraver" "Laser" press accept,et voilá you have the gcode of your image
- Open GRBL controller, connect to the machine
- Select the gcode that you've just created
- Send it and watch it burn! (the image of course)
Step 9: Designing the Case














For this part, we're going to use the Case pieces that we put aside on the first steps.
First of all think of where do you want to put your mainboard if its on the base or in the "backpack", or somewhere else! After you've done that all you have to do is place it there with some spacers. I bought mine, but you can salvage a ton of them from old motherboards if you have access to any.
Some tips when designing your case:
- Measure Measure Measure. A lot of times i have a lot of ideas on my mind then i forget to see if they actually fit together, or even if they fit where i want to put them so i end up redesigning a lot, which is very frustrating. Learn from my mistakes!
- Wait to do the paintjob when you have everything up and running. On this project i wanted sooo much to paint it that i painted it like every time i drew a hole on it. It was a really bad idea since some of the paints that i used didnt stacked up very well so i had to sand it (a lot) and the endresult didin't look very good on the base D: (The backpack looked great thou)
- Bear in mind cables that go in, and out!! You're going to need (at least) a cable for the power supply, and a cable for the USB. So when you decide where to put your board on your case, know that at least 2 cables will have to reach there!
- See that it's squared! for this project is very important that so try for the end result to be square!
- Ventilation is also very important for this project since the easydrivers get really hot if they draw too much current, so bear in mind that you need to put at least a couple of coolers, or very good disipators/heatsinks
- Don't be afraid to make mistakes, everything can be saved!
I've put some pictures of how mine looks on the inside, feel free to use it as an inspiration or just replicate it!
Step 10: Paint Jobs, Polishing , Final Touches












Soo, here we are finally, its all done, maybe its a little miscalibrated, or with a slight offset, but its mostly done.
For the last touches i painted my case with a "Galvanized Blue paint", that was the name, i dont have the can with me right now, but its from Argentina so i dont know if you can get it somewhere else (probably yes).
After that i took one of the fronts from the lot of CD/DVD drivers that i dismantled, and drilled the holes necessaries for my board. One to calibrate the laser intensity, one to put the cable for the power supply, one for the usb cable, and one to rule them all, of course.
After that i placed a little on-off switch, and that was it, i ran a couple of tests to see that everything worked fine and it was finally over!!! It took me about a month or two, because i was finishing college and fulltime job, so i kinda wanted it to end it really fast!
Step 11: A Little Troubleshooting!





















Alas, just when you think everything is running fine, and you can move to the next project/step, something breaks and your whole scheme falls out !. But fear not, we've all been there, so here's my case:
My y Plate was a little, weak. So while i was securing a piece of paper with some very strong magnets, i tried to remove a magnet and accidentally, removed my whole Y-plataform. It was a very sad day indeed.
But it gave me the perfect excuse to re-make it, and this time with some metal so i didin't have to use 2 magnets (one on top and one in the bottom) to secure pieces of paper, and use just 1.
What i did first was sand off all the residues of glue that were left behind and then screwed the carriage to the little peice of wood as best as i can, and replaced the top-most piece of wood with one made out of metal.
After that i made sure that everything was leveled (again) and then it was done! Sturdier than ever!
I'm also including here the Stretched x-piece that i talked about in a couple of steps before (that could replace 2 of the pieces that i use here) so you have an idea of what i'm talking about.I didn't use this piece on this project, but on a different one i'm working on!
Step 12: Final Product, Comments, Lessons Learned,










Well, this project was really fun to make, although i kinda rushed it a little bit since i cared more for the result than for the process. I highly recommend you take your time to build it, you'll enjoy it a ton more.
On the other hand it ended up being REALLY precise, as you can see on the images, and really powerful !! It can burn wood, plastic, paper, etc with no problem! and if you paint metal black, it'll remove the paint, i have yet to find out if it engraves it a little bit.
Anyways, i kinda rushed this instructable as well (i can't seem to be able to take my time with anything!) so if you have any questions,corrections, tips , or things that i can add please let me know!
Thanks and hope that you'll be reading from me very soon!

Second Prize in the
Full Spectrum Laser Contest 2016







