

Introduction: Floor Vacuum Cleaner Robot - Controlled by Arduino With Motor Shield





Floor vacuum cleaner robot. Version #16.
This version accumulated positive experience from previous versions.
Materials and components:
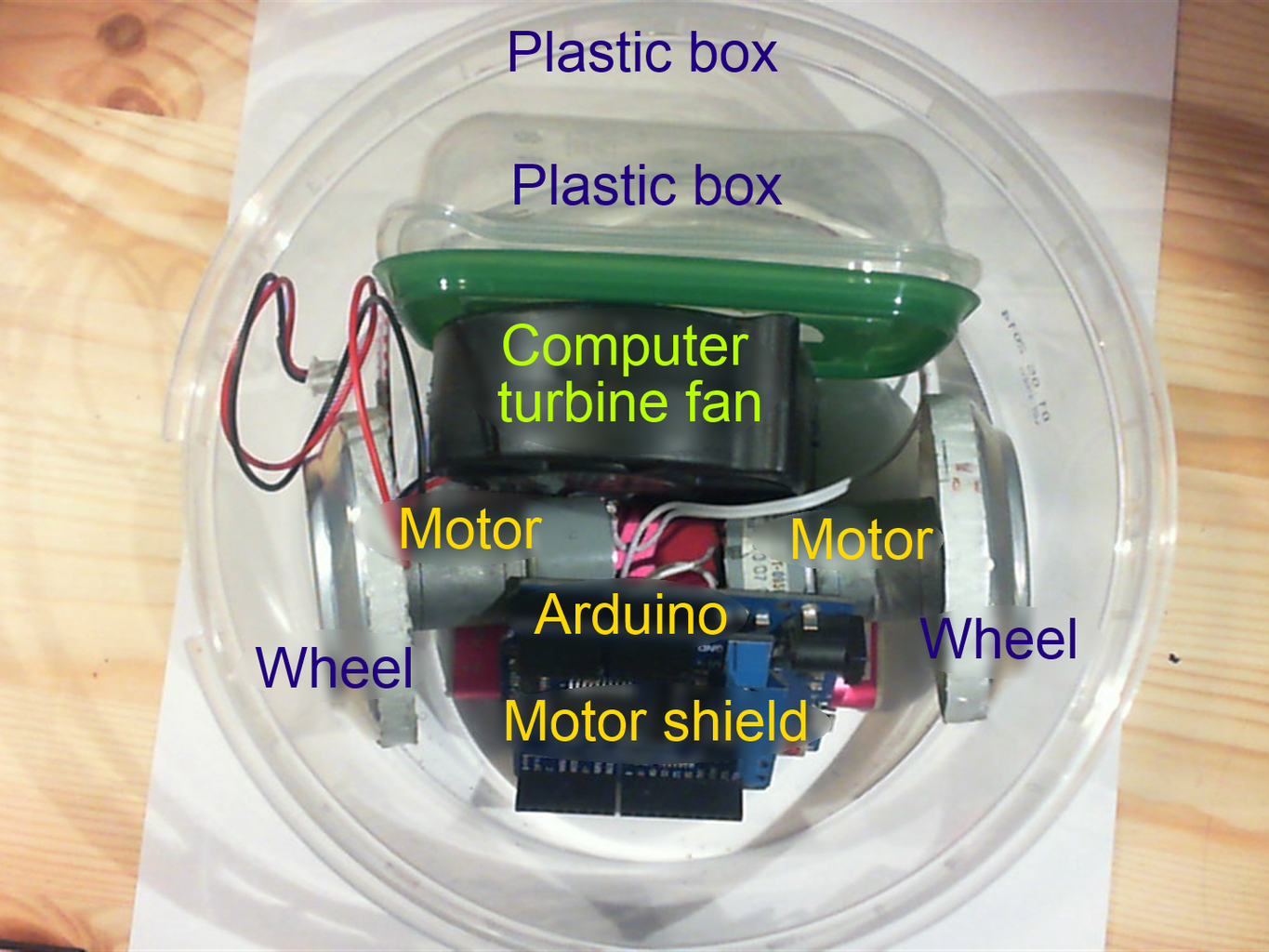
1. Arduino board;
2. Arduino Motor shield;
3. Two motors with gearboxes (3 Volts, ~100 RPM);
4. Two wheels or two aluminium cans;
5. Computer cooler turbine fan (5 Volts or 12 Volts with 5V to 12V step-up board);
7. Battery pack or accumulator - for 5V power supply;
8. Breadboard and power supply wires;
9. Big round plastic box - for housing;
10. Smaller plastic box - for dustbin;
11. Cardboard;
12. Melting glue;
13. Magnets;
Step 1:

https://github.com/satr/Robot-vacuum-cleaner-controlled-by-Arduino-and-motor-shield
The program is simple and similar to previous one - where Arduino was used with H-bridge motor-driver board (not Arduino shield). LED is not used, so pin 13 is free now.
Step 2:

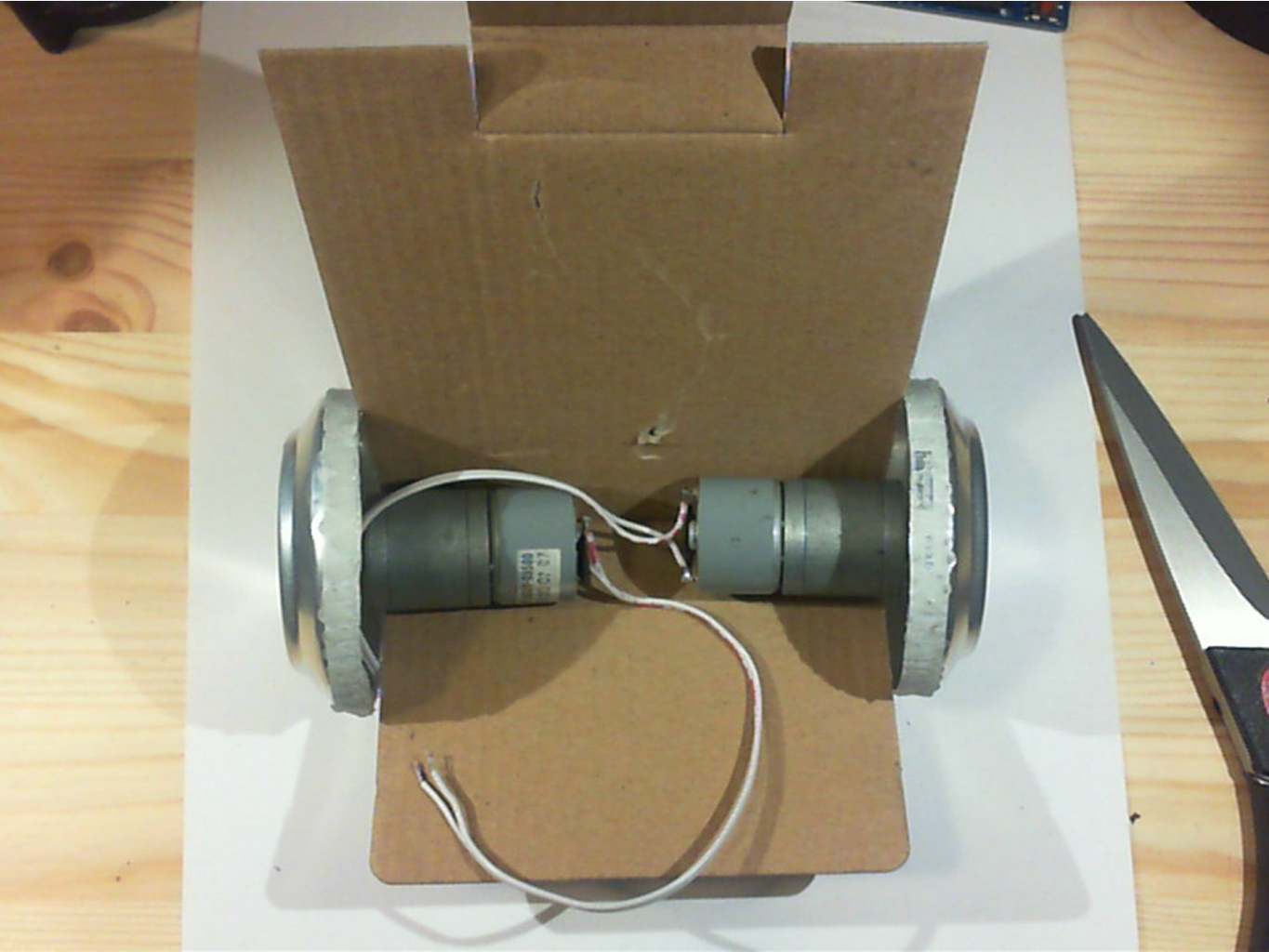

If there is no wheels - bottom of two aluminium cans may be used instead:
Cut the bottom part of an aluminium can, mark center of it, make a hole with size as motor's shaft, glue this wheel to the shaft by melting glue. Put some melting glue on sides of wheel to increase friction with floor. Such wheels are weak, but may be used at beginning and than be replaced with firm ones..
Synthetic fabric tissue for kitchen is used as filter in dustbin.
There are different Arduino motor shields. One used in this robot - does not have breaks and sensors. Another may have these features. There are commented lines of code in the program - for shields with breaks - they may use different pins.
Using magnets makes really easy to attach/detach housing and dustbin - no lockers or bolts/nuts.
Noise is not as annoying as from servos I tried to use instead of motors (on Version #14 - very disappointing variant).
Step 3:




Composition of dustbin is most efficient from quick build models used before. Dust is not stuck on nozzle like on once made of cardboard (as I tried earlier and on Version #15 which I made all from cardboard - even wheels - another fail variant).
If turbine fan is found with 5 volts power supply - step-up board is not needed.
There is no power-off button on this model.
Result of cleaning during half and hour is pretty well.







