

Introduction: How to Make an Obstacle Avoiding Arduino Robot! "My Robot V1"

This instructable shows steps instructions for making an obstacle avoiding robot using Arduino.
Let get started
my blog
http://robot4pro.blogspot.com/p/my-robots.html
Attachments

Step 1: Materials Required
Here's everything you need to make MyRobotV1. I'll provide links to where you can buy these parts
4WD Robot Chassis
1 servomotor
2 TB6612FNG Dual Motor Driver Carrier http://www.pololu.com/product/713
arduino uno
2 battery 9v
sona sensor
1 capacitor 100uf
some wires
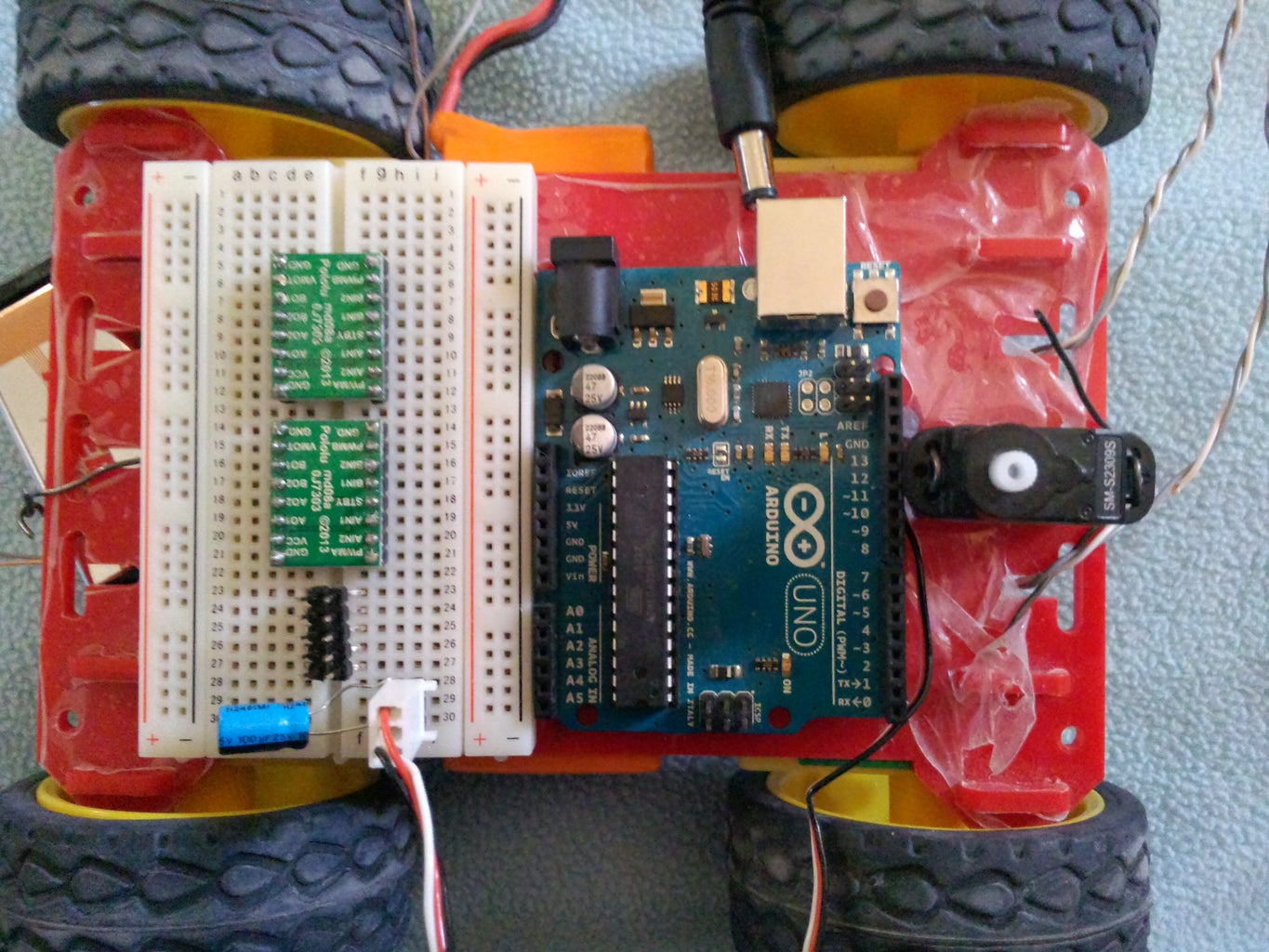
Step 2: Motor Driver Carrier and Servo Wiring



- Pin 5 ---> PWMA
- Pin 7 ---> AIN2
- Pin 8 ---> AIN1
- Pin 11 ---> STBY
- Pin 12 ---> BIN1
- Pin 13 ---> BIN2
- Pin 6 ---> PWMB
- Motor 1: A01 and A02 - Motor 2: B01 and B02
FOR SERVOMOTOR attatche to pin 4
Step 3: FLOWCHART AND CODE

First of all we start off with the diamond shape, the diamond shape represents a check. For this check we are seeing if there is an object closer than 30 cm to our robot. The check has two possible outcomes, yes or no. Yes, meaning that there is indeed some object closer than 30 cm. No, meaning that there is no objects detected within 30 cm.
If there is nothing within 30 cm the robot can simply move forward as the path is clear. If there is something closer than 30 cm the robot must perform obstacle avoidance maneuvers.
The first stage of obstacle avoidance is to stop the robot! If you don't stop the robot immediately it will crash!
Phew! That was dramatic.
After the robot has stopped it needs to see what way it should go. It does this by looking both directions, much like you should when you cross the road. First the robot turns left, takes a reading, turns right, takes a reading.
Another check occurs to see what direction is the best way to go. If left is the way to go it has to turn back to the left and then go forward. If right is the way to go the robot simply moves forward as it is already facing in the right direction.So that was pretty easy wasn't it? All we have to do now is convert that diagram into Arduino code and that's it, obstacle avoidance code done!
#include
#include
////////////////////////////////////////////////servo motor and sonar sensor ////////////////////////////////////////////
const int dangerdistance = 30; //safety distance for obstacles (in cm) Servo panMotor; // create a servo object #define TRIGGER_PIN 3 // Arduino pin tied to trigger pin on the ultrasonic sensor. #define ECHO_PIN 2 // Arduino pin tied to echo pin on the ultrasonic sensor. #define MAX_distance 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm. NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_distance); // NewPing setup of pins and maximum distance. ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// /////////////////////////////// MOTOR //////////////////////////////////////////////////////////////////
*
This code conducts a few simple manoeuvres to illustrate the functions: - motorDrive(motorNumber, motorDirection, motorSpeed) - motorBrake(motorNumber) - motorStop(motorNumber) - motorsStandby
Connections: - Pin 5 ---> PWMA - Pin 7 ---> AIN2 - Pin 8 ---> AIN1 - Pin 11 ---> STBY - Pin 12 ---> BIN1 - Pin 13 ---> BIN2 - Pin 6 ---> PWMB
- Motor 1: A01 and A02 - Motor 2: B01 and B02
*
/Define the Pins
//Motor 1 int pinAIN1 = 8; //Direction int pinAIN2 = 7; //Direction int pinPWMA = 5; //Speed
//Motor 2 int pinBIN1 = 12; //Direction int pinBIN2 = 13; //Direction int pinPWMB = 6; //Speed
//Standby int pinSTBY = 11;
//Constants to help remember the parameters static boolean turnCW = 0; //for motorDrive function static boolean turnCCW = 1; //for motorDrive function static boolean motor1 = 0; //for motorDrive, motorStop, motorBrake functions static boolean motor2 = 1; //for motorDrive, motorStop, motorBrake functions
////////////////////////////////////////////////////////////////////////////////////////////////////////////////// unsigned long time; // timer for boucle do ... while unsigned long timeplus;// timer for boucle do ... while
int distance; int uS; void setup() { //Set the PIN Modes motor pinMode(pinPWMA, OUTPUT); pinMode(pinAIN1, OUTPUT); pinMode(pinAIN2, OUTPUT);
pinMode(pinPWMB, OUTPUT); pinMode(pinBIN1, OUTPUT); pinMode(pinBIN2, OUTPUT); pinMode(pinSTBY, OUTPUT); //Serial.begin(9600); panMotor.write(90); delay(15000);// wait until I get ready panMotor.attach(4); // attaches the servo on pin 9 to the servo object }
//////////////////////////////////////////////////////////LOOP//////////////////////////////////////////////////
void loop() { panMotor.write(90); // turn a sonar sensor to 90 degree
delay(500); // ping sonar sensor to get distance int uS = sonar.ping(); int centerdistance = uS / US_ROUNDTRIP_CM; if(centerdistance==0){centerdistance=200;}// fix newping library mistaken
if (centerdistance>dangerdistance) //if path is clear { //********************************** WHILE NO OBSTACLE IN YOUR FRONT KEEP MOVING AND CHECK FOR OBSTACLE each 100 MS*******************
do // (while sensor give less than 30cm keep robot move forward ) { int uS = sonar.ping(); int centerdistance = uS / US_ROUNDTRIP_CM;; // check the sensors delay(100); // wait for sensors to stabilize motorDrive(motor1, turnCW, 150); motorDrive(motor2, turnCW, 150); } while (centerdistance < dangerdistance);
} //----------------------- pathe is blocked ----------------- else //if path is blocked { motorBrake(motor1); motorBrake(motor2); if(centerdistance
panMotor.write(175);// turn left delay(900); int leftdistance = sonar.ping()/US_ROUNDTRIP_CM; //scan to the left delay(500); if(leftdistance==0){leftdistance=200;}// fix newping library mistaken //////////////////////////////////////////////////////// COMPARE DISTANCE RIGHT AND LEFT //////////////////////////////////////////////////////////////////////// if (leftdistance>rightdistance && leftdistance>dangerdistance) //if left is less obstructed and super than dangerdistance { //Stop Motor1,Motor2 motorStop(motor1); motorStop(motor2); panMotor.write(175);//turn sonar to left " get ready to check left side of robot when it turn" delay(400); time=millis(); do // (do turn robot to left while sensor give less than 30cm and time not more then 800 ms ) { int uS = sonar.ping(); distance = uS / US_ROUNDTRIP_CM;; // check the sensors delay(100); // wait for sensors to stabilize //Turn towards motor1: Stop Motor1, slow Motor2 motorDrive(motor1,turnCCW, 180); motorDrive(motor2, turnCW, 180); timeplus=millis(); } while (distance > dangerdistance & timeplus-time<800);
motorBrake(motor1); motorBrake(motor2); panMotor.write(90);// turn sonar to origin position delay(2000);
} else if (rightdistance>leftdistance && rightdistance>dangerdistance) //if right is less obstructed and super than dangerdistance { //Stop Motor1,Motor2 motorStop(motor1); motorStop(motor2); panMotor.write(5); delay(400); time=millis(); do //(do turn robot to right while sensor give less than 30cm and time not more then 800 ms ) { int uS = sonar.ping(); distance = uS / US_ROUNDTRIP_CM; // check the sensors delay(100); // wait for sensors to stabilize motorDrive(motor2,turnCCW, 180); motorDrive(motor1, turnCW, 180); timeplus=millis(); } while (distance > dangerdistance & timeplus-time<800); motorBrake(motor1); motorBrake(motor2);
panMotor.write(90); delay(2000); } else // if no solution { // stop everything motorBrake(motor1); motorBrake(motor2); motorsStandby(); panMotor.write(90); delay(9000); } } }
///////////////////////////// FUNCTIONS /////////////////////////////////////////
void motorDrive(boolean motorNumber, boolean motorDirection, int motorSpeed) { /* This Drives a specified motor, in a specific direction, at a specified speed: - motorNumber: motor1 or motor2 ---> Motor 1 or Motor 2 - motorDirection: turnCW or turnCCW ---> clockwise or counter-clockwise - motorSpeed: 0 to 255 ---> 0 = stop / 255 = fast */
boolean pinIn1; //Relates to AIN1 or BIN1 (depending on the motor number specified)
//Specify the Direction to turn the motor //Clockwise: AIN1/BIN1 = HIGH and AIN2/BIN2 = LOW //Counter-Clockwise: AIN1/BIN1 = LOW and AIN2/BIN2 = HIGH if (motorDirection == turnCW) pinIn1 = HIGH; else pinIn1 = LOW;
//Select the motor to turn, and set the direction and the speed if(motorNumber == motor1) { digitalWrite(pinAIN1, pinIn1); digitalWrite(pinAIN2, !pinIn1); //This is the opposite of the AIN1 analogWrite(pinPWMA, motorSpeed); } else { digitalWrite(pinBIN1, pinIn1); digitalWrite(pinBIN2, !pinIn1); //This is the opposite of the BIN1 analogWrite(pinPWMB, motorSpeed); }
//Finally , make sure STBY is disabled - pull it HIGH digitalWrite(pinSTBY, HIGH);
}
void motorBrake(boolean motorNumber) { /* This "Short Brake"s the specified motor, by setting speed to zero */
if (motorNumber == motor1) analogWrite(pinPWMA, 0); else analogWrite(pinPWMB, 0); }
void motorStop(boolean motorNumber) { /* This stops the specified motor by setting both IN pins to LOW */ if (motorNumber == motor1) { digitalWrite(pinAIN1, LOW); digitalWrite(pinAIN2, LOW); } else { digitalWrite(pinBIN1, LOW); digitalWrite(pinBIN2, LOW); } }
void motorsStandby() { /* This puts the motors into Standby Mode */ digitalWrite(pinSTBY, LOW); }








