

Introduction: Obstacle Avoiding Robot

In robotics , obstacle avoidance is the task of satisfying some control objective subject to non- intersection or non-collision position constraints . It has a sonar sensor which are used to sense the obstacles coming in between the path of robot . It will move into the best direction and avoid the obstacle which is coming in its path. By adding sensor in this robot one can simply collect data from the environment .
It can perform more precisely than many robots even in a small place .
Step 1: Know How This Thing Works

You can see the most updated informations from my github repository.
Step 2: Gather Things :
An arduino uno or any arduino (I have used arduino uno)
A sonar sensor (HC-SR 04)
A few jumper wires
2 resistor (220 ohms)
L298 dual motor control driver
A battery
A chassis (Normally includes other needed components )
2 gear motors
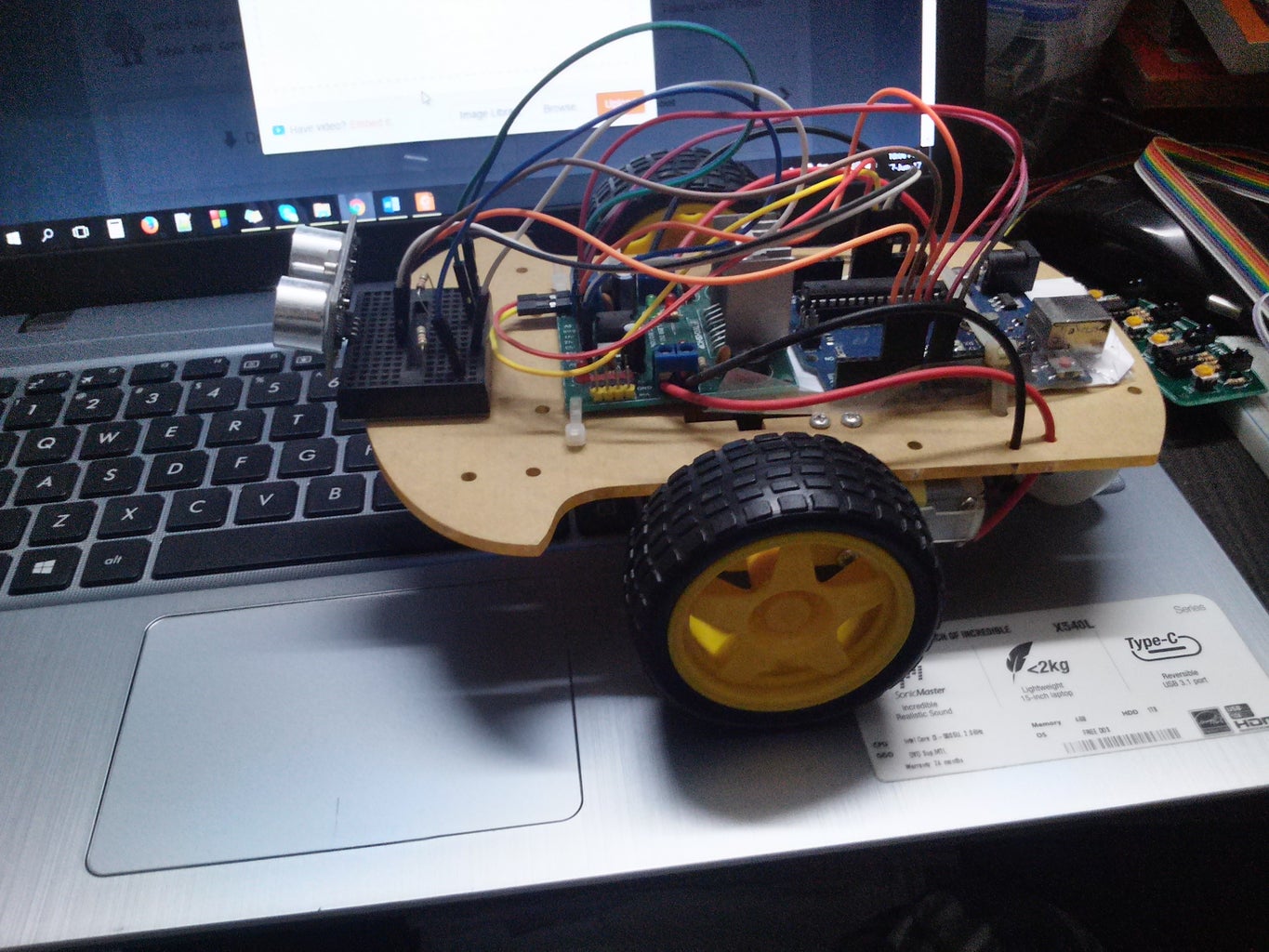
Step 3: Connect All Parts :
Sonar connections :
Vcc – 5 Volt
GND – GND
Trig – Arduino 4
Echo – Arduino 5
Motor driver :
EnB – 220 ohms resistor - 5 Volt (Motor Driver – to control speed) (EnB to enable through a 220 ohms resistor)
EnA – 220 ohms resistor - 5 Volt (Motor Driver – to control speed) (EnA to enable through a 220 ohms resistor)
IN1 – Arduino 9
IN2 – Arduino 8
IN3 – Arduino 7
IN4 – Arduino 6
GND – Arduino GND
Vcc – Arduino Vin
Now connect motors with driver via Motor-A and Motor-B port .
Step 4: Upload Code :
Lets upload the code into the heart . It’s the beauty
of the robot . If you want you can modify pins or code . Such as – modifying speed , minimum distance from object , duration of running in any direction. Useful comments are given in the code to understand more easily .
(No extra driver or header file needed)
I have uploaded the file , you also can get the code here (to see more updates)








