

Introduction: Print-in-Place Robotic Gripper








Robotics is a fascinating field, and we're lucky to live in a time when the DIY robotics community is producing some amazing work and projects. While many of these projects are astoundingly advanced and innovative, I've been seeking to make robots that are simple, both in composition and manufacturing. The goal of this project was to make a super-simple and easy-to-build robotic gripper. The gripper itself is 3D printed as a single part in a flexible filament. After printing, cables, a servo motor and some screws are installed and the gripper is ready to move!
Materials:
- Arduino
- Flexible filament (WillowFlex, NinjaFlex, SemiFlex or similar)
- 4x 8mm M3 Thread Forming Screws (McMaster Part #96817A908)
- 4x Small Philips screws
- Nylon string
- Metal-geared micro servo and the two mounting screws and one horn screw
- 12mm radius circular servo horn
Tools:
- 3D printer
- Torx Screwdriver
- Philips Head Screwdriver
- Tweezers
UPDATE: Thank you to everyone who voted for me in the Robotics Contest! I am so incredibly honored to be amongst the first prize winners!
Step 1: Printing



The first step is to 3D print the part that serves as the entire structure and body of the gripper. As the fingers move via live hinges, the part must be printed in a flexible filament such as WillowFlex, NinjaFlex or SemiFlex. I also suggest printing it on a flat and clean print surface, such as a glass bed, in order to ensure the best first layer possible. It can be printed with standard settings for whatever filament you are using.
Attachments

Step 2: Add Servo Motor





Connect the micro servo motor to the back of the gripper by using the two mounting screws included with the servo. The servo should slot into the gripper easily. Zero the servo by turning the shaft all the way to the left side. Then take the circular servo horn and place it on the motor so that the four holes on the servo horn line up with the four arms of the gripper. Secure the horn onto the motor using the included screw.
Step 3: Add Cables








Take the nylon string and thread it through the center of one arm from the outside to the center. Once it has reached the hub, thread it through the corresponding hole on the servo horn from underneath. Pull it through and cut the line so there is about 4 inches of it on each end. Screw in a 8mm M3 screw into the end on the arm and use a small Phillips screw to secure the string onto the horn. Repeat for all four arms.
Step 4: Operation

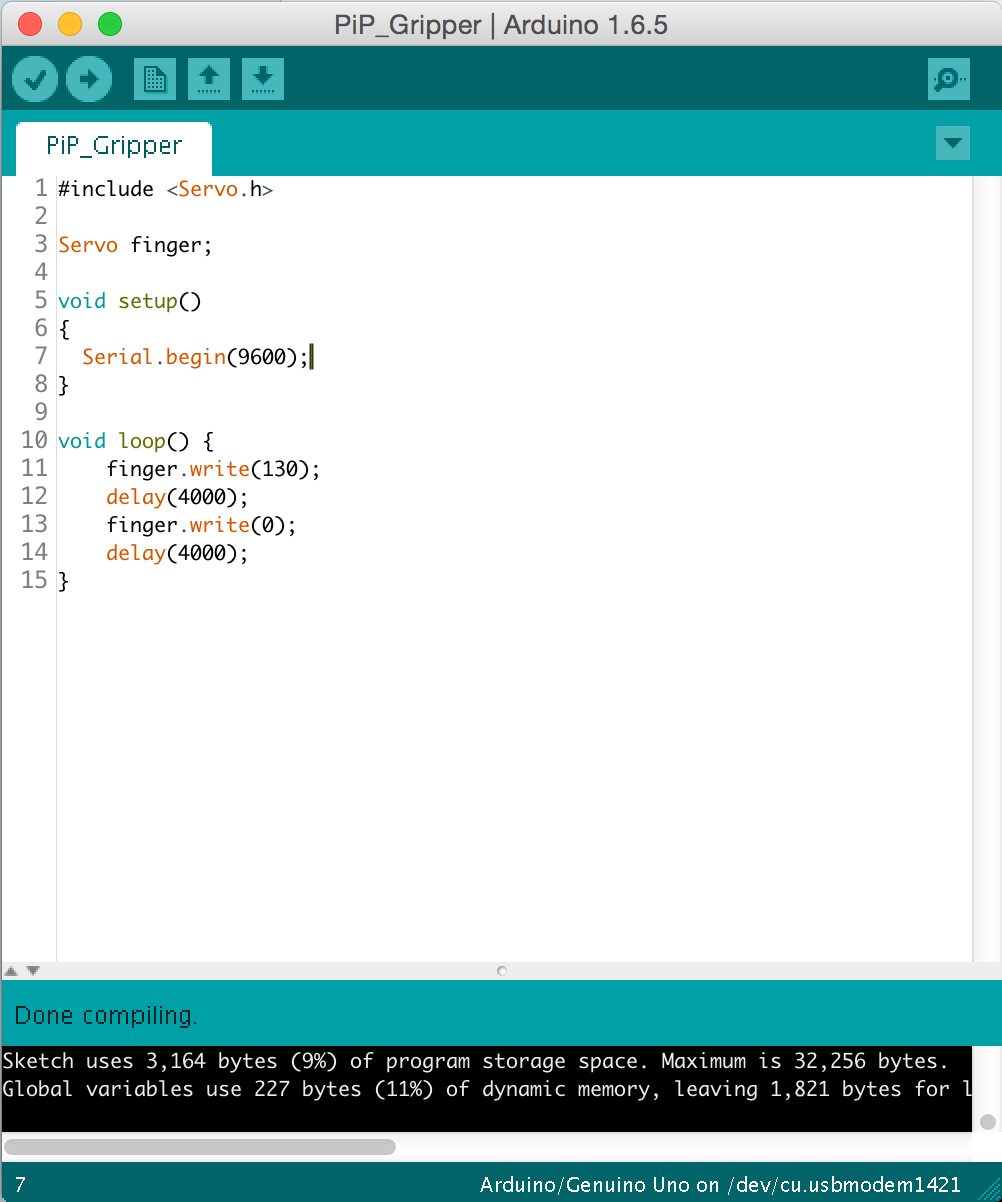
To use the gripper, connect the servo motor to an Arduino microcontroller as the wiring diagram shows and upload the sample code. You may need to adjust how much the servo turns depending on how taught your cables are. Happy gripping! :)

First Prize in the
Robotics Contest 2017







