

Introduction: Arduino + 2 Servos + Thumbstick (joystick)




This time I will help you move the same 2 servos with a thumbstick.
And again I have surf the internet to see If there are tutorials that clear to understand specially for
the beginner Arduino user and, I have not found one.
To move 2 servos with the thumbstick is way easier and painless than using the mouse. And the reason for this is that some times the processing software does not work correct or there is a conflict between the arduino software and the processing software.
For all the connections I will use the bread board.
Dont forget to vote for me on the Arduino challenge!!!
Enjoy and have fun!!!! ;)
Biomech75
Step 1: Materials
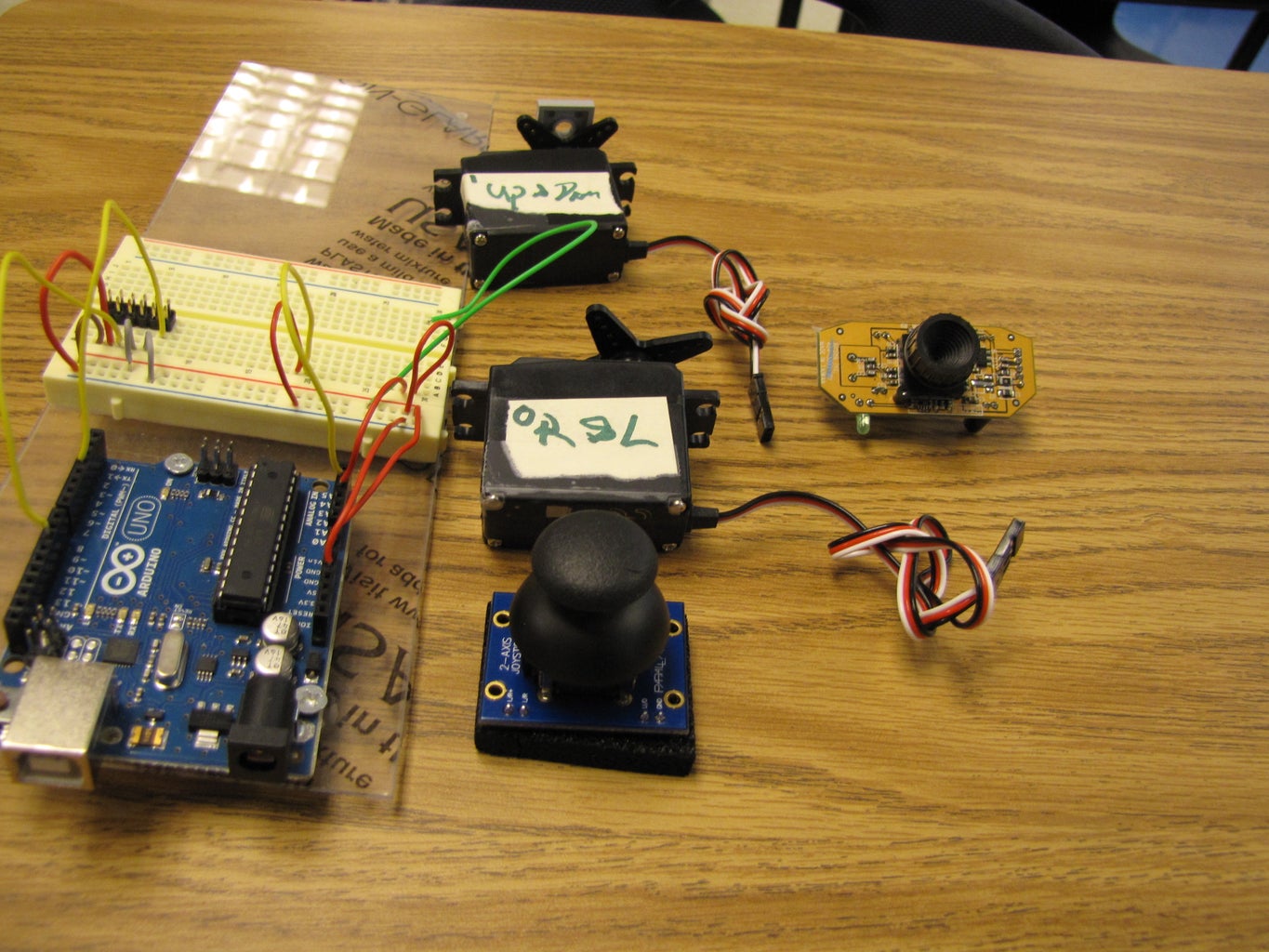
Hardware: (bought @ Radioshack)
Arduino Board (I am using the UNO REV 3 version)
2 Parallax servos
Parallax Thumbstick (joystick)
Small Bread Board
Solderless Breadboard Jumper Wire
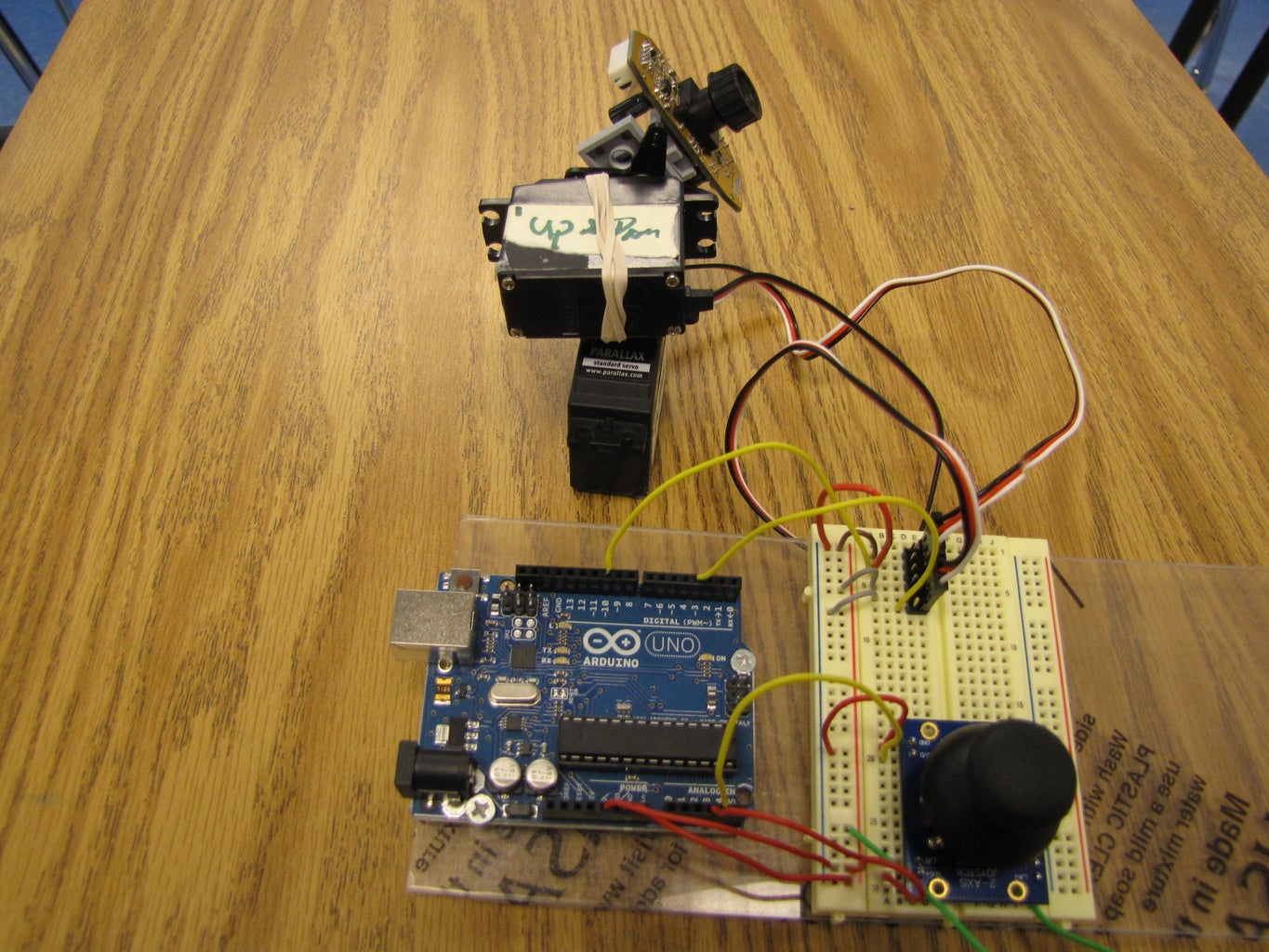
Something to see the 2 servos movement ( I am using a broken Web Cam and some legos not shown, for this tutorial)
Step 2: Connecting the Servos
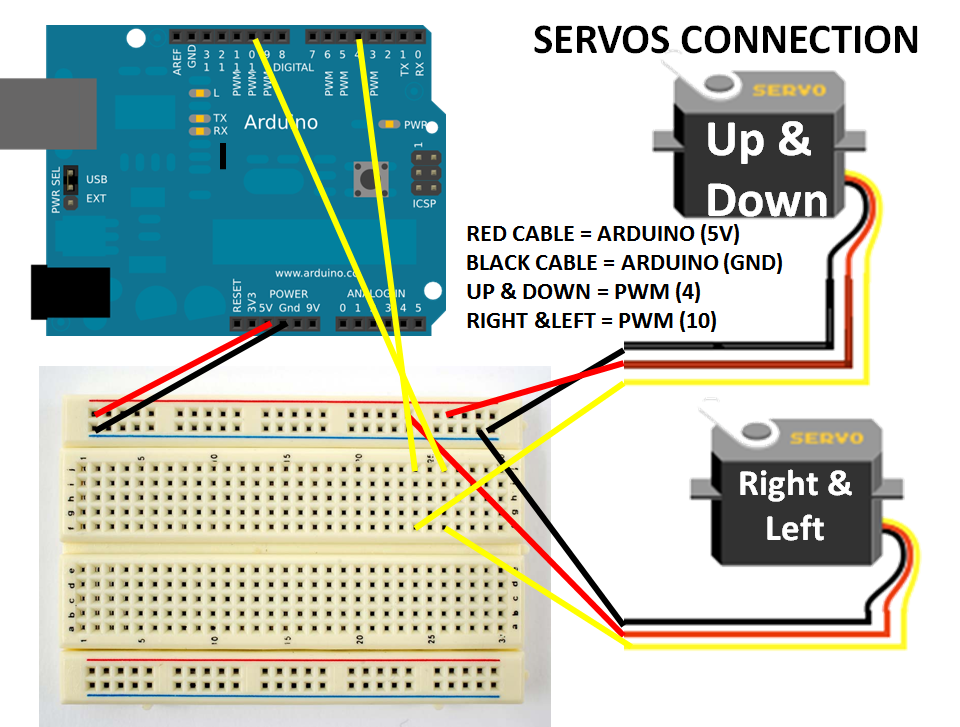
I will start with the 2 servos. (I am using the bread board to make all connections easy)
You can use the picture for more information.
Servo Up/Down Arduino Servo Right/Left Arduino
Red Cable------------------------ 5V Red Cable------------------------ 5V
Black Cable---------------------- GND Black Cable---------------------- GND
Yellow or White Cable--------- PWM (4) Yellow or White Cable--------- PWM (10)
Step 3: Connecting the Thumbstick (joystick)

The follwing connection will confuse you a little, just follow the picture.
Again using a bread board will make things easier.
1. The thumbstick has one U/R+ and one L/R+ this two connections will provide power to the joystick. Connect them to the Arduino 5V connection.
2. Also the joystick has two L/R connections and two U/D connections it is important that you connect both of them to the respective arduino pin.
3. Do the same to both GND connections on the joystick.
Thumbstick Arduino
L/R+ ---------------------- 5V
U/D+ ---------------------- 5V
GND GND --------------- GND
U/D U/D ------------------ Analog 4
L/R L/R ------------------- Analog 3
NOTE: Always double check the connections!!!
Step 4: The Code
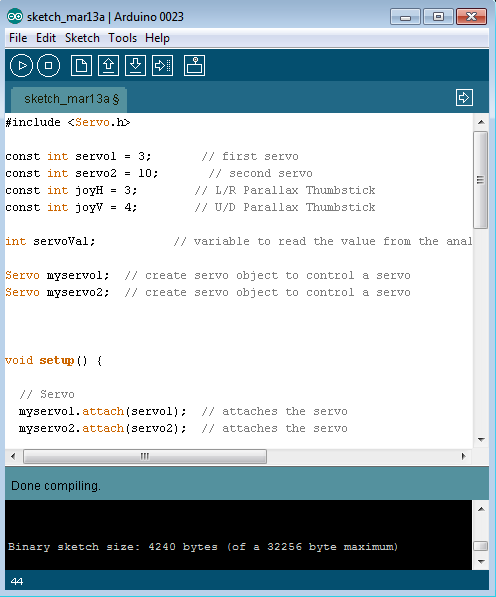
Not much to explain... just copy and paste the following code to the arduino software.
Always test (compile) the code before uploading it to the Arduino Board.
When you upload the code to the arduino the servos should not move until you use the joystick.
CODE:
#include <Servo.h>
const int servo1 = 3; // first servo
const int servo2 = 10; // second servo
const int joyH = 3; // L/R Parallax Thumbstick
const int joyV = 4; // U/D Parallax Thumbstick
int servoVal; // variable to read the value from the analog pin
Servo myservo1; // create servo object to control a servo
Servo myservo2; // create servo object to control a servo
void setup() {
// Servo
myservo1.attach(servo1); // attaches the servo
myservo2.attach(servo2); // attaches the servo
// Inizialize Serial
Serial.begin(9600);
}
void loop(){
// Display Joystick values using the serial monitor
outputJoystick();
// Read the horizontal joystick value (value between 0 and 1023)
servoVal = analogRead(joyH);
servoVal = map(servoVal, 0, 1023, 0, 180); // scale it to use it with the servo (result between 0 and 180)
myservo2.write(servoVal); // sets the servo position according to the scaled value
// Read the horizontal joystick value (value between 0 and 1023)
servoVal = analogRead(joyV);
servoVal = map(servoVal, 0, 1023, 70, 180); // scale it to use it with the servo (result between 70 and 180)
myservo1.write(servoVal); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}
/**
* Display joystick values
*/
void outputJoystick(){
Serial.print(analogRead(joyH));
Serial.print ("---");
Serial.print(analogRead(joyV));
Serial.println ("----------------");
}
Step 5: Torubleshooting

1. The servos won't move.
A. Check the connections, remember in this tutorial we use PWM pins for the servos and the Analog pins for the joystick.
2. When I upload the code to the board the servos, they start vibrating.
A. It means that either U/D+ or L/R+ are not properly connected. Double check your connections. You have to disconnect the usb from the board to verify connections try to review the connections on step 3.
3. I double check the connections and the servos wont move.
A. Take out the joystick and reconnect it again in the bread board by pressing it down to make sure it is connected. Connections have to be tight from the joystick to the bread board.
Any other help or issues you have feel free to let me know and I will be glad to help all of you. ;)

Participated in the
Arduino Challenge







