Introduction: DIY HOW TO MAKE a OBSTACLE AVOIDER ROBOT ( AND CODE)





the obstacle avoider robot avoid s all the obtscale before it and can move forward
Step 1: GET THE COMPONENTS
THINGS REQUIRED
ULTRA SONIC SENSOR http://amzn.to/2ETX4ix
SERVO MOTOR http://amzn.to/2H3gVfM
CHASIS http://amzn.to/2jCWoEL
WHEELS http://amzn.to/2B4EN2w
ARDUINO UNO/NANO http://amzn.to/2B6UKoM
BREAD BOARD http://amzn.to/2yachqQ
4V LEAD ACID BATTERY *3 http://amzn.to/2kdY0EF
L298N MOTOR DRIVER http://amzn.to/2kgh3xN
CONNECTING WIRES http://amzn.to/2B3nejk
Step 2: MAKE THE CONNECTIONS
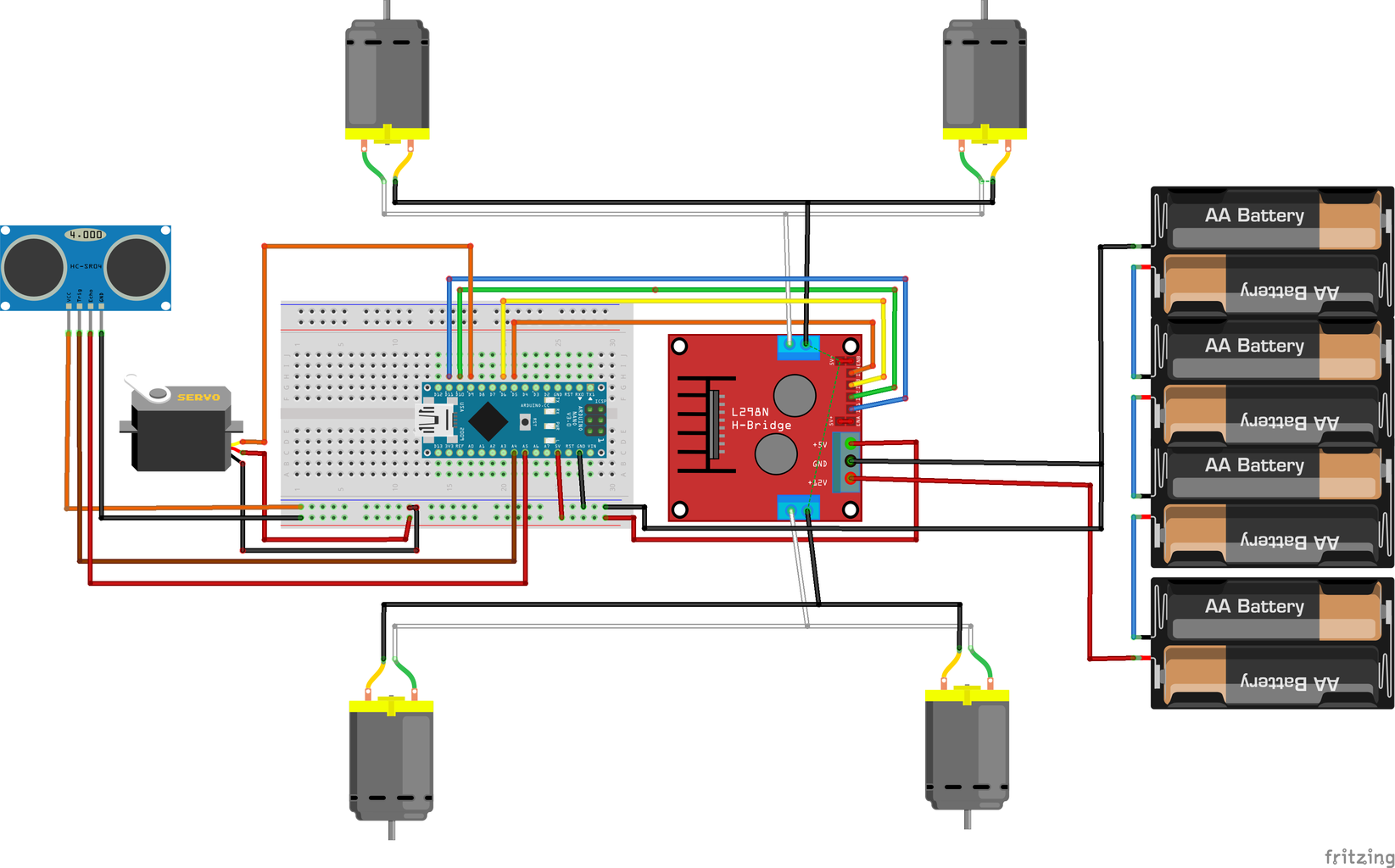
CONNECT THE MOTORS ,CASTOR WHEELS , MOTORS AND ARDUINO BOARD TO THE CHASSIS
FOLLOW MY YOUTUBE VIDEO TO MAKE PERFECT CONNECTIONS
Step 3: ASSEMBLE ALL THE PARTS
connect the wiring to the motor driver and arduino and connect the battery to the shield
Step 4: GET THE CODE
#include //Servo motor library. This is standard library
#include //Ultrasonic sensor function library. You must install this library
//our L298N control pins const int LeftMotorForward = 7; const int LeftMotorBackward = 6; const int RightMotorForward = 4; const int RightMotorBackward = 5;
//sensor pins #define trig_pin A1 //analog input 1 #define echo_pin A2 //analog input 2
#define maximum_distance 200 boolean goesForward = false; int distance = 100;
NewPing sonar(trig_pin, echo_pin, maximum_distance); //sensor function Servo servo_motor; //our servo name
void setup(){
pinMode(RightMotorForward, OUTPUT); pinMode(LeftMotorForward, OUTPUT); pinMode(LeftMotorBackward, OUTPUT); pinMode(RightMotorBackward, OUTPUT); servo_motor.attach(10); //our servo pin
servo_motor.write(115); delay(2000); distance = readPing(); delay(100); distance = readPing(); delay(100); distance = readPing(); delay(100); distance = readPing(); delay(100); }
void loop(){
int distanceRight = 0; int distanceLeft = 0; delay(50);
if (distance <= 20){ moveStop(); delay(300); moveBackward(); delay(400); moveStop(); delay(300); distanceRight = lookRight(); delay(300); distanceLeft = lookLeft(); delay(300);
if (distance >= distanceLeft){ turnRight(); moveStop(); } else{ turnLeft(); moveStop(); } } else{ moveForward(); } distance = readPing(); }
int lookRight(){ servo_motor.write(50); delay(500); int distance = readPing(); delay(100); servo_motor.write(115); return distance; }
int lookLeft(){ servo_motor.write(170); delay(500); int distance = readPing(); delay(100); servo_motor.write(115); return distance; delay(100); }
int readPing(){ delay(70); int cm = sonar.ping_cm(); if (cm==0){ cm=250; } return cm; }
void moveStop(){ digitalWrite(RightMotorForward, LOW); digitalWrite(LeftMotorForward, LOW); digitalWrite(RightMotorBackward, LOW); digitalWrite(LeftMotorBackward, LOW); }
void moveForward(){
if(!goesForward){
goesForward=true; digitalWrite(LeftMotorForward, HIGH); digitalWrite(RightMotorForward, HIGH); digitalWrite(LeftMotorBackward, LOW); digitalWrite(RightMotorBackward, LOW); } }
void moveBackward(){
goesForward=false;
digitalWrite(LeftMotorBackward, HIGH); digitalWrite(RightMotorBackward, HIGH); digitalWrite(LeftMotorForward, LOW); digitalWrite(RightMotorForward, LOW); }
void turnRight(){
digitalWrite(LeftMotorForward, HIGH); digitalWrite(RightMotorBackward, HIGH); digitalWrite(LeftMotorBackward, LOW); digitalWrite(RightMotorForward, LOW); delay(500); digitalWrite(LeftMotorForward, HIGH); digitalWrite(RightMotorForward, HIGH); digitalWrite(LeftMotorBackward, LOW); digitalWrite(RightMotorBackward, LOW); }
void turnLeft(){
digitalWrite(LeftMotorBackward, HIGH); digitalWrite(RightMotorForward, HIGH); digitalWrite(LeftMotorForward, LOW); digitalWrite(RightMotorBackward, LOW);
delay(500); digitalWrite(LeftMotorForward, HIGH); digitalWrite(RightMotorForward, HIGH); digitalWrite(LeftMotorBackward, LOW); digitalWrite(RightMotorBackward, LOW); }

Step 5: Get the Ping Library
download the ping library and add it to the arduino
Step 6: AND YES YOU ARE DONE
enjoy with the robot






