

Introduction: 'Little Tank' Robot Arduino/Picaxe/Tamiya Platform











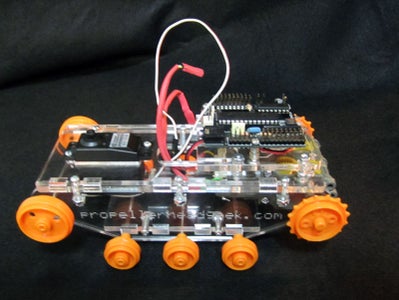
Neat little laser cut tank design, a companion to this instructable. Made in response to the poorly made offerings on the market, and a general need for a ready to go, easily adaptable tracked platform. Uses a Tamiya 70097 motor/gearbox combo and a Tamiya 70100 track and wheel mechanical kit.
Easily adaptable to a wide range of battery, sensing and microcontoler combinations. Use A standard or micro servo (adapter plate included in cut file), standard servo recommended. Parallax Ping mounted on the ranging mast; SRF05, 05 or multiple IR ranging solutions will fit as is.
Deck height is adjustable to accommodate just about battery arrangement, including lipo (with a regulator).
Cut files provided in CDR and DXP format, or get www.ponoko.com to cut them for you if you'd prefer not to cut your own.
Cut files are sized for 4mm acrylic material - if you use a different material thickness, be sure to resize the file for a good fit. Easily adaptable for CNC , just create an offset and machine away.
Step 1: Cut Your Parts!

Settings for a Epilog helix - Bottom up engraving, 300DPI; raster = 57 speed, 100 power; vector = 8 or 9 speed, 100 power, 5000 freq.

Step 2: Wiring Diagram

Attachments

Step 3: Assemble Your Tools and Components

As always, don't cut your fingers off or stick a hot soldering iron in your nose...
You'll need:
qty 1 laser cut parts from you, ponoko or something similar
qty 1 microcontroler of your choice (picaxe used in this instructable)
qty 1 pParallax ping, SRF04, SRF05 or IR range finder (ping used in this instructable)
qty 1 Tamiya 70097 motor/gearbox combo
qty 1 Tamiya 70100 Track and wheel mechanical set
qty 1 standard or micro servo (standard recommended)
qty 3 servo extenders (male to male) or roll your own with wires and female headers
qty 4 .5" screws and nuts size 4-40 (hardware store)
qty 16 .75 screws and nuts size 4-40 (hardware store)
multimeter and soldering iron if you make your own wires
Step 4: Assemble the Ranging Mast


You'll need the 2 components of the ranging mast, 2 spacers, 2 .5 4-40 screws and nuts, 1 .75 4-40 screw and nut.
Step 5: Top Deck / Electronics Deck


You'll need 2 .75 4-40 screws + nuts for the top deck and 2 .75 4-40 screws + nuts and 4 spacers for the electronics board + microcontroler.
Step 6: Sides / Tamiya 70097 Motor Gearbox / Assembly

You'll need the Tamiya 70097 + 2 sides to create this assembly.
Step 7: Complete Frame / Electronics Deck / Servo





You'll need the previous assembly, plus the top and lower deck for this assemble. Use qty 10 .75 4-40 screws + nuts to complete this step.
you'll need qty 4 4-40 nuts to attach the electronics deck to the main frame.
you'll need qty 2 .5 4-40 screws + nuts to attach the servo. - also, attach the servo BEFORE attaching the top deck...
Step 8: Wheel Bars / Wheels / Treads / Sonar Mast


Not Much to say here.. no other parts needed. So...
Step 9:

Destroy Jupiter 2! Destroy Robinson family! Destroy! Destroy!
Have fun


![Tim's Mechanical Spider Leg [LU9685-20CU]](https://content.instructables.com/FFB/5R4I/LVKZ6G6R/FFB5R4ILVKZ6G6R.png?auto=webp&crop=1.2%3A1&frame=1&width=306)




