

Introduction: Simple Bots: Walker






My goal with Walker Bot was to make a 4-legged walking bot that could be made in ten minutes. This bot ultimately took me three hours to make. That said, my goal wasn't to make one in ten minutes, but to make one that could be made in ten minutes. I am pretty confident that now that I know what I am doing, should I need to make a second one, I could do it in ten minutes. At the very least, you will be hard-pressed to make a simpler walking bot than this one. I would consider this project a glowing success.
Check out my book Homemade Robots for more projects! |
Step 1: Go Get Stuff

You will need:
(x2) Continuous rotation servos modified for direct drive**
(x1) 4 x AA battery holder
(x1) DPDT lever switch
(x1) telephone handset
(x2) CDs
(x2) 6" bolts
(x2) 5" bolts
(x4) bolts
(x4) bolt covers
(x2) thin 1" nut and bolt
(x1) a couple dozen assorted zip ties
(x1) print template (download below)
**Modify your servos for direct drive here
(Note that some of the links on this page are affiliate links. This does not change the price of any of the items for sale. However, I earn a small commission if you click on any of those links and buy anything. I reinvest this money into materials and tools for future projects. However, you are obviously free to source the items as you please.)

Step 2: Open It Up



Remove the covers from the telephone handset and pull out the speaker, microphone and jack. These should come right out.
Step 3: Drill



Drill 4 holes in each end of the telephone handset as pictured.
Essentially, you should drill the holes in such a way that they create a square on the backside of each opening.
Step 4: The First Motor


Starting on the side of the handset opposite where the jack was, pass the motor's wires through the body of the phone and out the hole created by removing the jack.
Insert the first motor into the handset opening that is on the opposite side of the jack, in such a way that the horn is facing inwards.
(The horn is the gear-like object attached to the servo shaft)
Step 5: The Second Motor








Pass the second motor's wires through the hole created by the jack and insert that motor into the end of the handset. Make certain that the horn for this motor is also facing inwards, as well.
Zip tie them both in place using the holes that you have drilled in Step 3.
Step 6: Switch


Zip tie the DPDT switch to the round mouthpiece opening, right above the hole created by removing the jack.
There should probably a small lip, upon which the switch can sit.
Make certain that the lever of the switch is pointing upwards (towards the gear on the motor).
Step 7: Template

If you have not done so already, download and print out the template file.
Cut out around the circumference of the two large circles.
Step 8: Cut the CDs










Tape the templates to the center of each CD.
For the two large outer holes, drill 1/4" holes (or whatever is appropriate for your 5" and 6" bolts).
For the four smaller inner holes, drill 1/8" holes (or whatever is appropriate for your thinnest zip ties).
On the one CD with the outer notch, cut this shape out of the CD using a pair of general-purpose scissors.
Step 9: Battery Holder




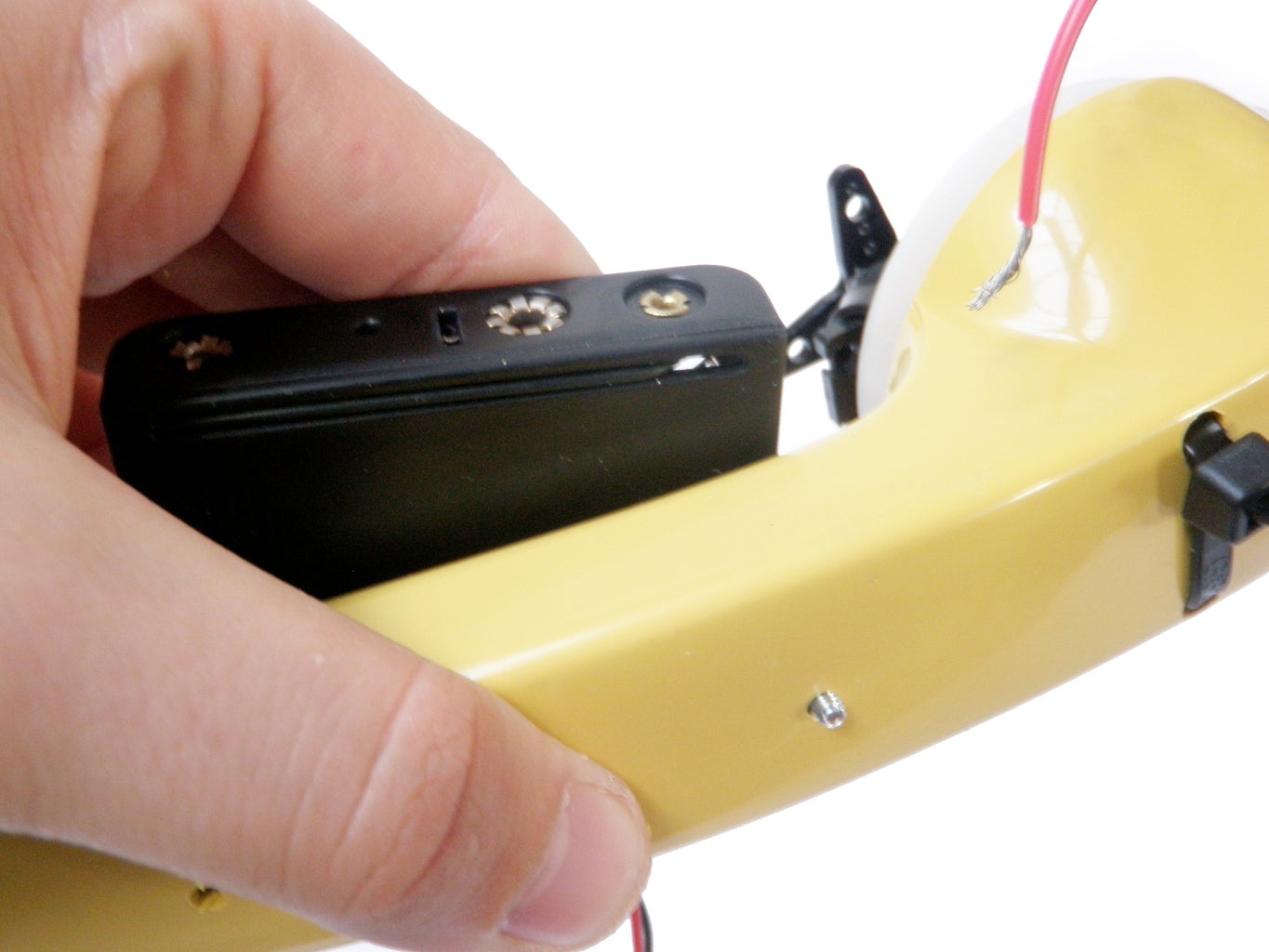

Drill two 1/8" holes into the center of the handset such that they line up with the mounting holes of your AA battery holder.
Bolt the battery holder onto the handset with your pair of 1" nuts and bolts.
Step 10: Wire It Up






Solder the red and black wires from the battery holder to each of the center terminals of the DPDT switch.
Solder two short wires such that an "X" is formed between the outer terminals of the switch. Basically, the back left would be connected to the front right and the front left to the back right. This causes power to be applied backwards when the switch is flipped.
Solder together the red wire from motor 1 with the black wire from motor 2 and the black from motor 1 with the red from motor 2 (which motor is designated to be which is unimportant).
Lastly, solder the red and black wire pairs to either set of outer terminals. For instance, solder one pair to the back left terminal and the other pair to the back right terminal.
If all of this sounds really confusing, just check the wiring diagram below.
Step 11: Attach CDs






If necessary, make or widen holes in the servo horn with a 1/8" drill bit to accommodate the zip tie.
Zip tie the CDs to the motors in such a way that the motor is at the center of its rotation point and the two outer holes are perpendicular to the handset.
Also, keep in mind that the outer notch was cut to allow the switch lever to stick through.
Step 12: Bolt




Pass the shorter bolts through the notched CD, towards the body of the phone.
Pass the longer bolts through the other CD.
Fasten all of them in place with nuts.
Step 13: Bolt Covers

Cover all of the bolts with rubber bolt covers to give them a bit more traction.
Step 14: Power!


Center the CDs such that the bolts are perpendicular to the body of the phone.
Insert batteries, and then let it go.

Did you find this useful, fun, or entertaining?
Follow @madeineuphoria to see my latest projects.
Participated in the
Dadcando Family Fun Contest







