

Introduction: Arduino ITTT

Dit is mijn arduino project:
Het autotje wat van je wegrijdt als je ermee wil spelen, heerlijk om kinderen mee te plagen.
in de volgende slides laat ik zien hoe ik te werk ben gegaan.
Step 1: Testing the Circuits


Ik begon met het testenvan het motortje, hiervoor heb ik enkele videos bekeken online en wat forums bezocht. Ik testte de motorwerking door:
De zwarte kabels gaan naar de GROUND, de rode kabels gaan naar de power source, in dit geval de 3.3 V, omdat deze specifieke motortjes die ik gebruik draaien op 1.5 – 3 V.
Het blauwe kabeltje gaat naar een wisselspannings digital in, hiermee regel je straks de stroom naar de motor.
De transistor is de sleutel tot het regelen van de stroom, hij kan de stroomafvoer naar het motortje dicht of open zetten. De middelste pin van de transistor is de gate, dit is waar je het dicht kan gooien met een signaal uit het blauwe draad die je aanstuurt met code.
De linkerpin van de transistor hier is de Vcc, oftewel de stroomtoevoer naar de transistor. De stroom die wordt gegeven door de arduino gaat eerst door de transistor heen via deze linker pin. Als de gate open staat (met code geregeld), dan loopt de stroom door naar de motor en krijgt deze stroom.
De rechterpin van de transistor gaat naar de ground, hier wordt de stroomkring gesloten.
Dit is wat ik heb gevonden als makkelijkste manier van een regelbare motor en zo heb ik hem in elkaar gezet.
Step 2: Testing the Sensor

Voor de infrarood
beweginssensor heb je verder geen breadboard nodig als je genoeg ruimte over hebt op je arduino.
Omdat ik voor mijn motoren de 3.3V out gebruik en mijn infraroodsensor uit zichzelf het beste werkt op een 5V bron (staat in de productspecificaties) heb ik genoeg ruimte over.
Hetzelfde als in vorige schema geld voor rood en zwart: Rood is voor stroomtoevoer en zwart is naar de ground/om de kring af te sluiten.
De gele draad gaat het signaal aan de arduino geven en daat dus naar een digital pin. Vanuit hier kun je dan in je code het signaal waarnemen en dit gebruiken om dus in ons voorbeeld de motoren stroom te geven.
De LED zit in de digital pin daar om aan te geven wanneer de sensor iets detecteert, dit staat straks in de code.
Step 3: Combining


Dit is uiteindelijk hoe het volledige stroomcircuit is opgezet.
In de code stuur ik alle onderdelen aan, de code voeg ik in als afbeelding in de volgende stap.
Step 4: All My Code



In de afbeeldingen hierboven staat alle code die ik heb gebruikt.
De eerste afbeelding is om te testen of mijn motoren uberhaupt functioneerden via code. Toen de transistor stuk ging bijvoorbeeld werkte deze code niet meer.
Vervolgens ben ik overgegaan op een andere code voor de motoren waar ik niet alleen een HIGH of LOW kon geven aan mijn motoren maar een value tussen de 0-255 om de speed aan te passen. dit ging via de seriële monitor. Deze code heb ik uiteindelijk geimplemeteerd in het volledige script.
De uitleg over wat de code doet staat in de code zelf bijgeschreven.
Ik zal in de volgende stap mijn volledige procesverslag als bestand invoegen. daar is de afbeelding waarschijnlijk een stuk beter te lezen en krijg je het volledige proces goed mee.
Step 5: Mijn Volledige Verslag
Hij downloadt het bestand hier onder een gekke naam, warning.
Attachments

Step 6: New Concept
Ik wilde oorspronkelijk een autotje maken die van je wegrijdt zodra je
in de buurt komt. In mijn nieuwe idee heb ik het een stapje verder genomen en is het idee een snoepdoos die naar je toe komt rijden. Klinkt heerlijk zon snoepje, maar zodra de doos in de buurt van je komt rijdt hij plotseling achteruit van je weg, dit herhaalt zich permanent tot je uiteindelijk zelf het snoepje uit de doos haalt.
Step 7: Stroomkring



In de images hierboven kan je zien hoe ik mijn stroomkringen heb geregeld. het is allemaal heel easy omdat ik een motor driver heb gekocht om de motoren mee te beheersen en de sensor niet in de kring van de motoren hoeft te zitten.
Het zit hem voornamelijk in de code
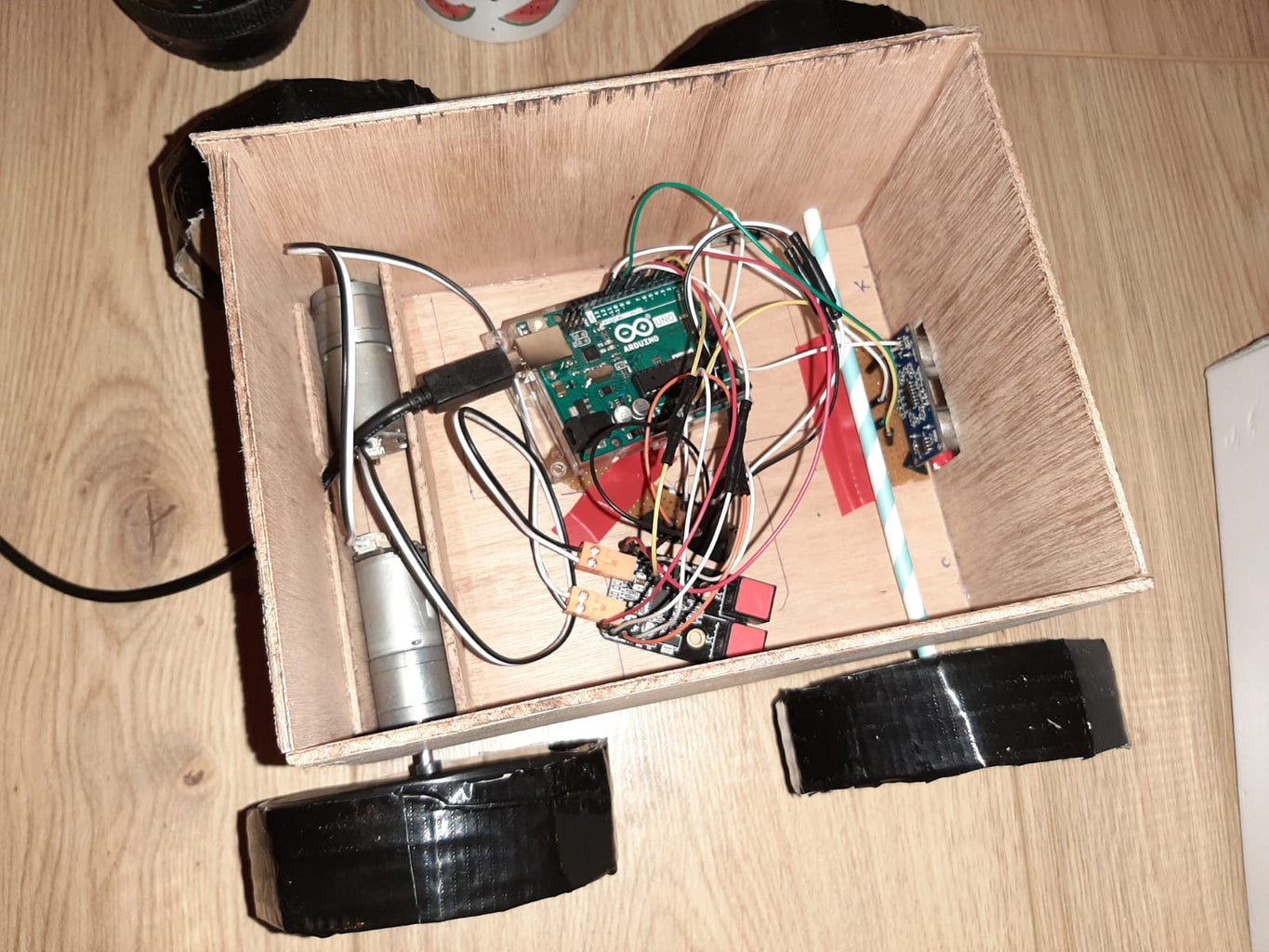
Step 8: Behuizing




Voor de behuizing heb ik uit 3,6 mm triplex platen gezaagd en daarmee twee dozen gemaakt die over elkaar heen schuiven (zoals sommige schoenendozen).
Om goed bij de binnenkant te kunnen heb ik
bedacht om twee boxes te maken. De inner box bevat het mechanisme van de snoepkar en de outer box past perfect om de inner box heen vanaf de bovenkant, de wielbasis is dan nog zichtbaar en er is ruimte voor de sensor aan de voorkant zonder dat de outer box deze bedekt(zie laatste foto).
deze boxes heb ik vervolgens geschilderd met acrylverf om het een mooi geheel te maken.
uiteindelijk is het niet gelukt om het apparaat op batterijen te laten lopen dus moest ik er een gat in maken aan de achterkant waar de usb kabel doorheen kon naar de pc.
Step 9: De Code!



De code is extreem simpel, te zien op de afbeelding.
Als eerste (dit valt net buiten de screenshot
helaas) zorg je ervoor dat je al je pins defined.
2 pins voor de echo sensor: echo (INPUT) en trig (OUTPUT)
4 pins (totaal) voor de motoren, deze zijn allemaal OUTPUT (dirpins en motorcontrolpins)
Fritzing schema motoren, tweede afbeelding
Helaas ondersteunt fritzing geen soortgelijke motor driver (mijn versie niet in ieder geval), maar via deze afbeelding die ik heb gevonden ben ik er achter gekomen hoe het werkt.
De twee linker draden zijn voor stroomtoevoer
en ground.
De twee rechter kabels zijn voor de pulse width modulation (PWM) en direction (no modulation) en gaan in digital pins. De twee linker pins gaan naar de Vin en de ground op de arduino voor stroomtoevoer.
Voor de HC-SR04 sensor (laatste afbeelding) heel simpel:
De twee buitenste kabels gaan naar de power en
ground.
De linker (Trig naar de PWM pin) is een OUTPUT in onze code en stuurt het signaal voor de pulse en de rechter kabel (echo) is de INPUT receiver en ontvangt het signaal terug in de 11e niet PWM pin.
Deze bovenste twee fritzings kan je heel makkelijk mergen omdat ze los staan van elkaar, dus je hoeft alleen maar de twee circuits tegelijkertijd aan te sluiten op je arduino en je bent klaar.
Step 10: Geupdate Verslag
Hier bijgevoegd het volldeige verslag van mijn arduino project.

![Tim's Mechanical Spider Leg [LU9685-20CU]](https://content.instructables.com/FFB/5R4I/LVKZ6G6R/FFB5R4ILVKZ6G6R.png?auto=webp&crop=1.2%3A1&frame=1&width=306)





