

Introduction: Arduino Robotic Arm and Monitoring With Processing
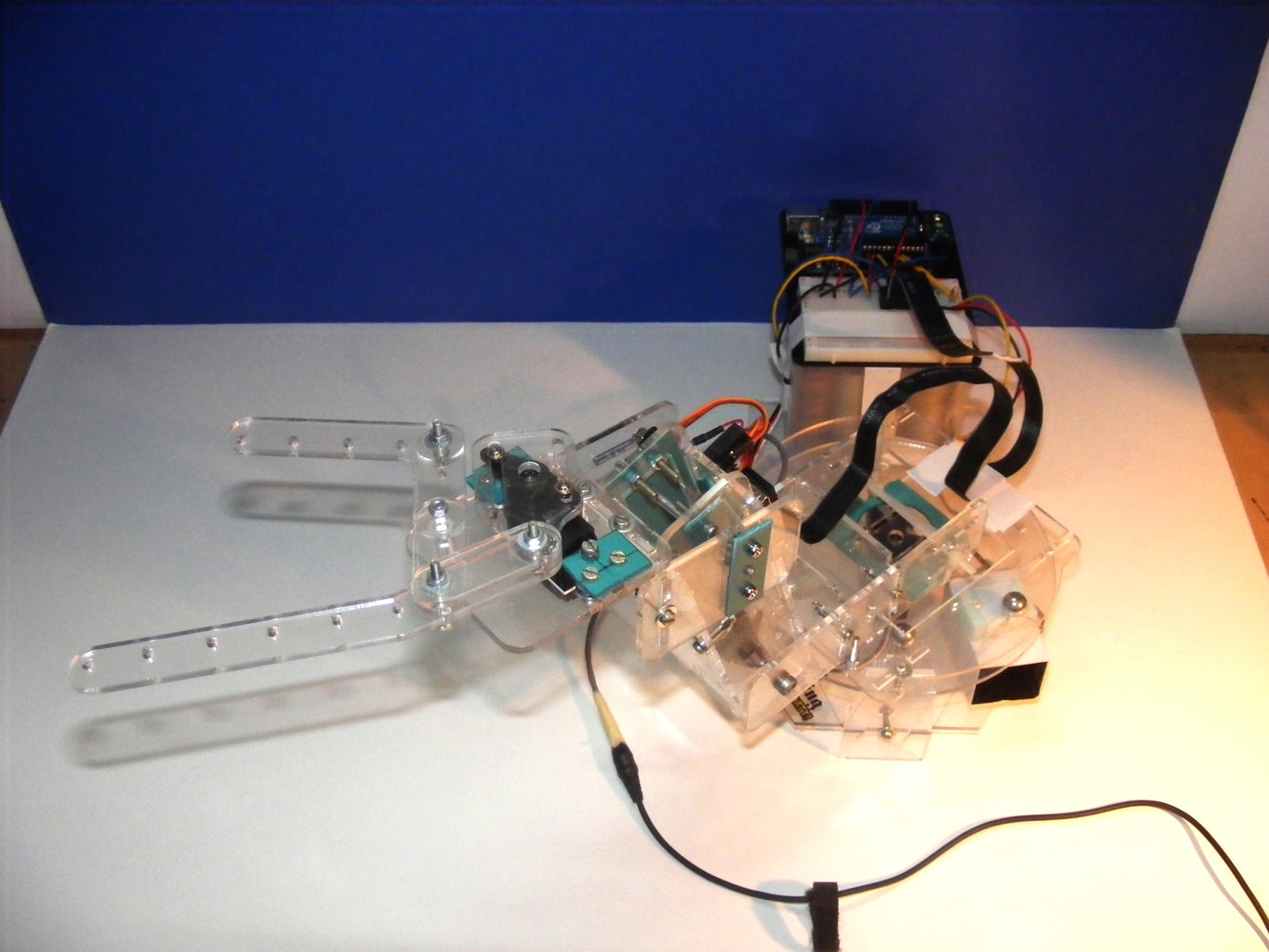





the robotic arm grabs an object after it detects it using the motion detector and then it moves it at a specific location.
list of parts:
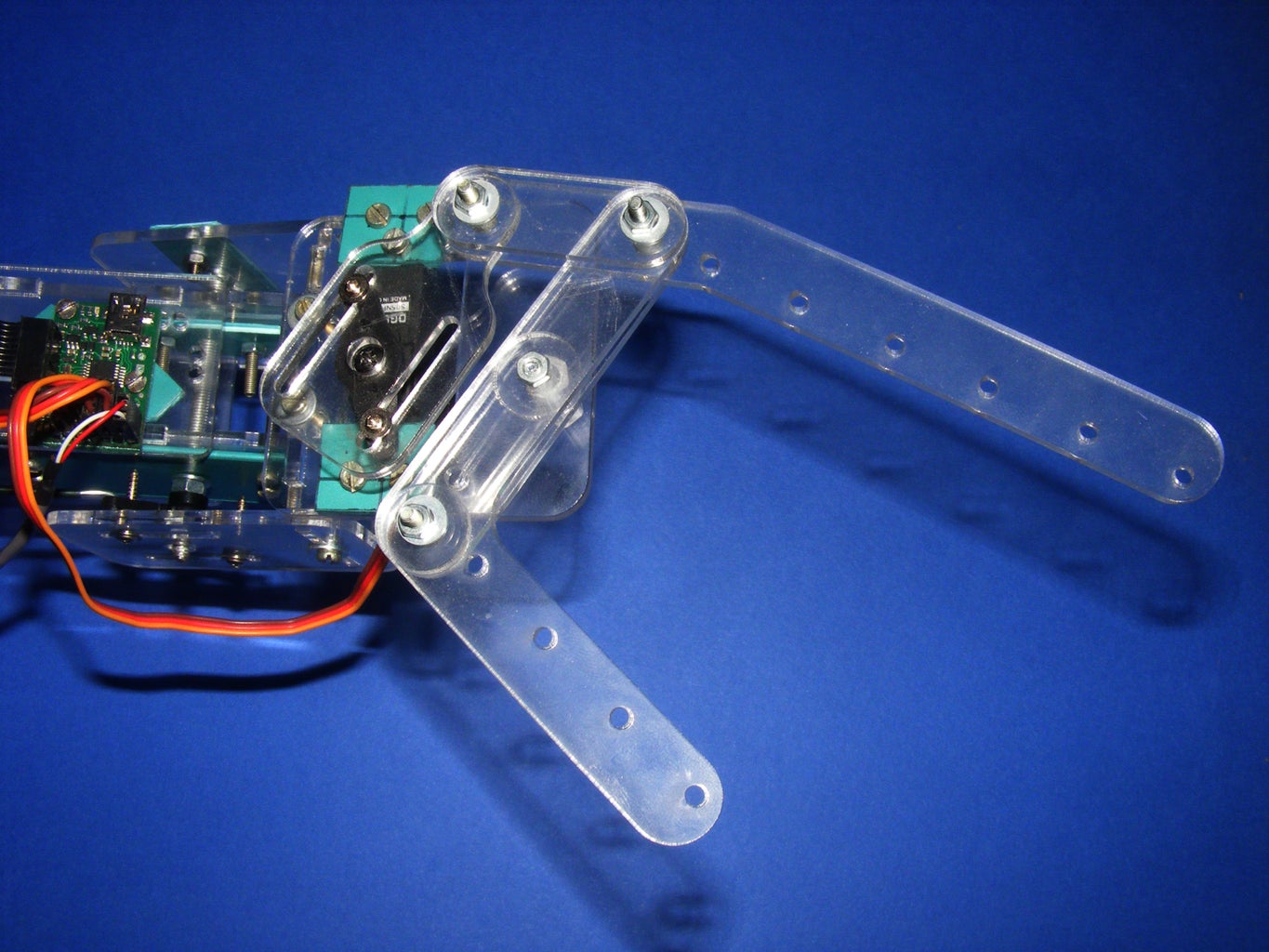
1.3 servos
2. passive infrared motion detector : http://www.sparkfun.com/products/8630
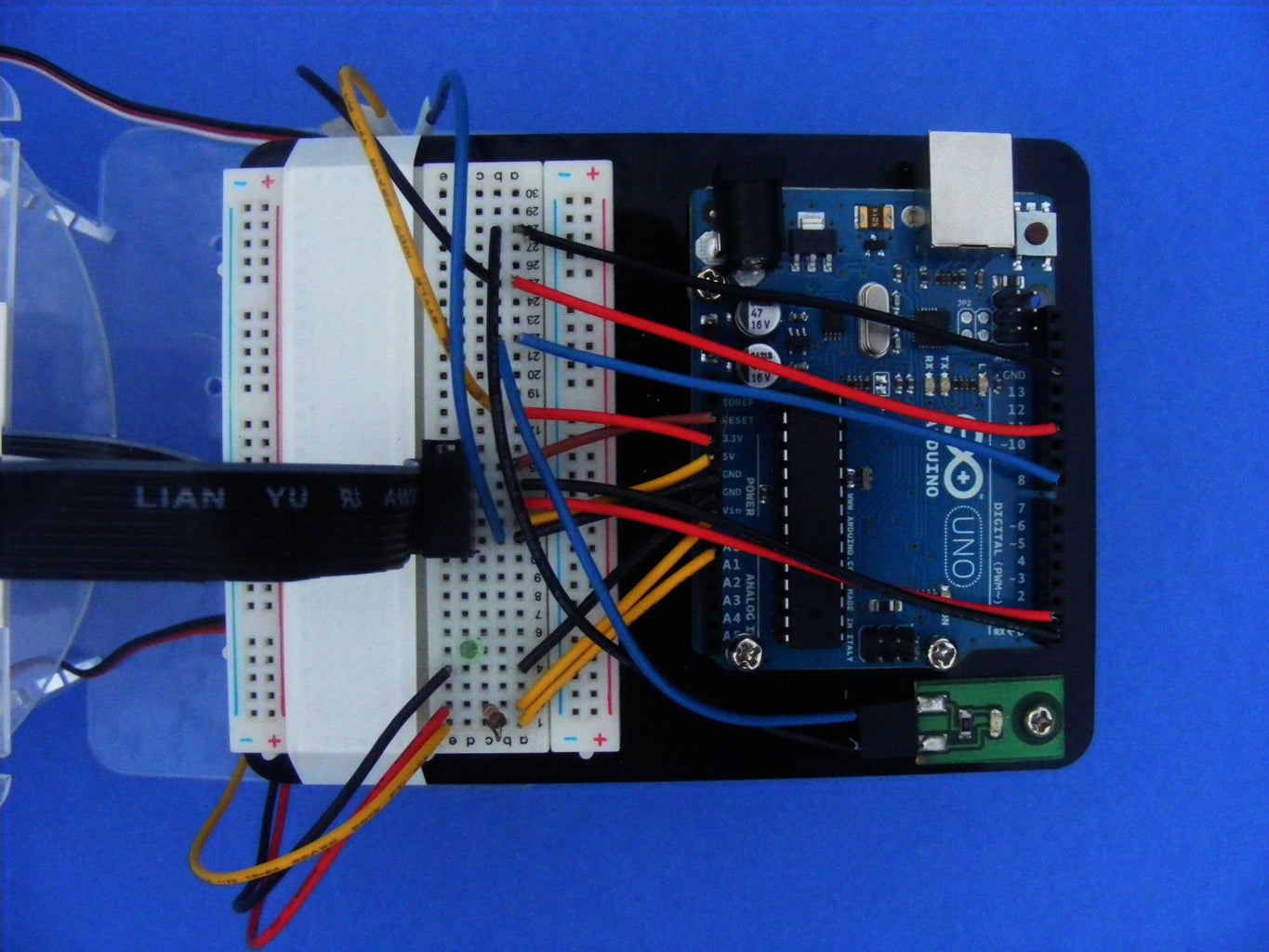
3. arduino uno R3 board
4. micro maestro 6 channel servo controller : http://www.pololu.com/catalog/product/1351
5. LED for detecting confirmation.
the reason that i used the servo controller is because with it i can controll the speed and the acceleration for the servos.
even though in the video i posted are 4 monitoring programs(panels), actually those 4 are exactly the same with only one difference, the angle of view. So, the robotic arm is controlled by an arduino uno platform, and with any movement it sends via TTL(serial-usb) a specific code that is received by the processing graphic program witch analyses it and move the virtual arm after the real one.
this is the video i made:
http://www.youtube.com/watch?v=KMp_ws_b23E
make sure you check it out.
if you just need to see or want to use the code that i made, both the arduino and the processing one, or you have any questions, i'll be glad to answer. just leave me a message.



![Tim's Mechanical Spider Leg [LU9685-20CU]](https://content.instructables.com/FFB/5R4I/LVKZ6G6R/FFB5R4ILVKZ6G6R.png?auto=webp&crop=1.2%3A1&frame=1&width=306)




