

Introduction: DIY FPV RC Tank V2 [2km RANGE Upgrade!]
![DIY FPV RC Tank V2 [2km RANGE Upgrade!]](https://content.instructables.com/FX7/787D/HX42PPFI/FX7787DHX42PPFI.jpg?auto=webp&fit=bounds&frame=1&height=1024&width=1024auto=webp&frame=1&height=300)
![DIY FPV RC Tank V2 [2km RANGE Upgrade!]](https://content.instructables.com/FPH/WT63/HZ88PVC8/FPHWT63HZ88PVC8.jpg?auto=webp&fit=bounds&frame=1&height=1024&width=1024auto=webp&frame=1&height=300)
![DIY FPV RC Tank V2 [2km RANGE Upgrade!]](https://content.instructables.com/FDM/R529/HZ88PYJK/FDMR529HZ88PYJK.jpg?auto=webp&fit=bounds&frame=1&height=1024&width=1024auto=webp&frame=1&height=300)
![DIY FPV RC Tank V2 [2km RANGE Upgrade!]](https://content.instructables.com/FW8/9WZS/HZ88PY0G/FW89WZSHZ88PY0G.jpg?auto=webp&fit=bounds&frame=1&height=1024&width=1024auto=webp&frame=1&height=300)
![DIY FPV RC Tank V2 [2km RANGE Upgrade!]](https://content.instructables.com/F5V/U2DE/HX42PPFS/F5VU2DEHX42PPFS.jpg?auto=webp&fit=bounds&frame=1&height=1024&width=1024auto=webp&frame=1&height=300)



![3D Printed Xiaomi FPV Camera saver [ExoYi]](https://content.instructables.com/F8G/PJV6/IVHQI934/F8GPJV6IVHQI934.png?auto=webp&crop=1%3A1&frame=1&width=130)
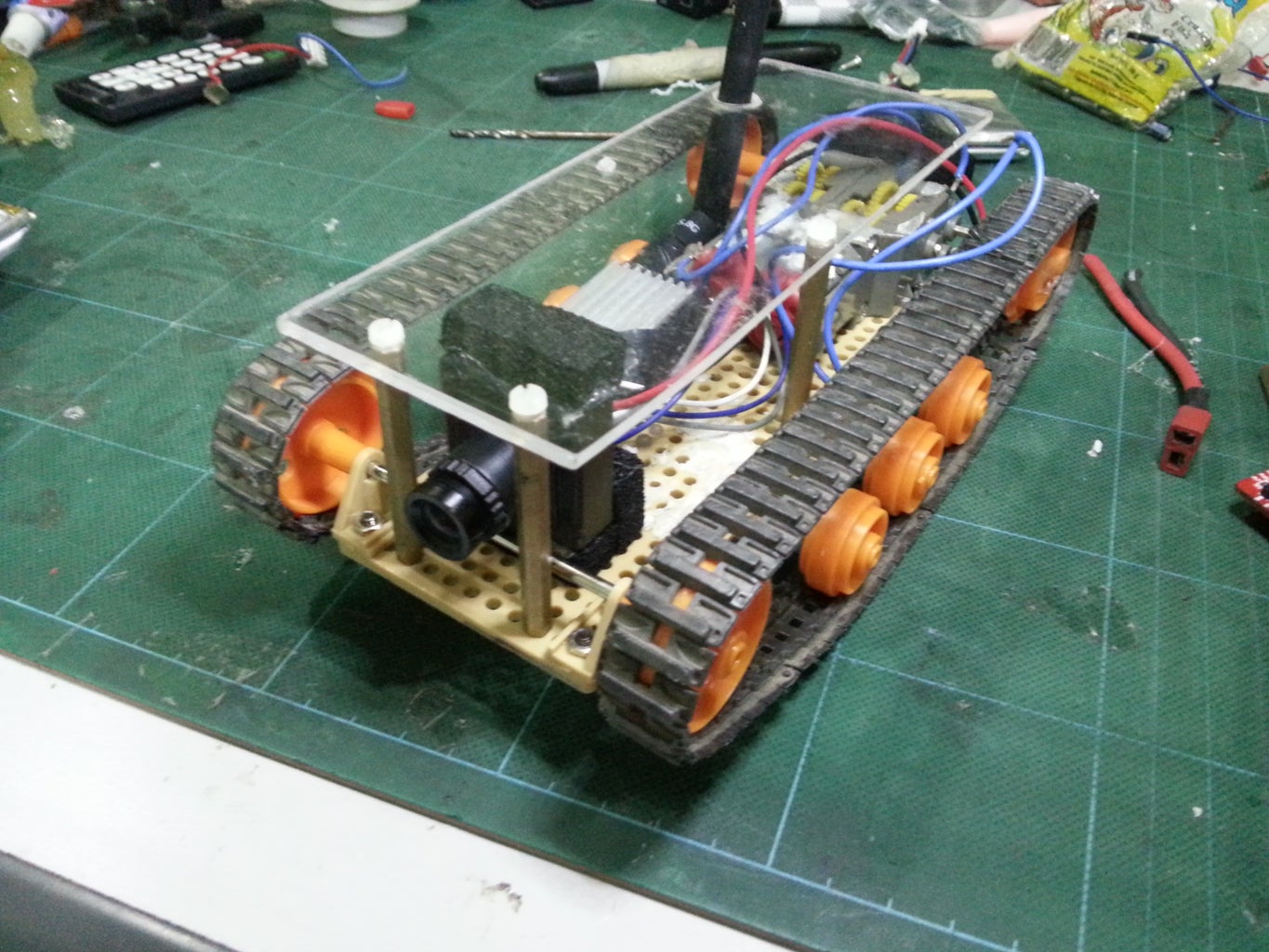
Lets build An FPV tank that could be controlled within 2 kilometers! With the help of my best friend ASCAS I was able to borrow his old parts for this updated version. Ok So Roverbot version 2 is a highly educational Arduino based ATV-drone. It's simple to make, easy to program and is a great starter project for hobbyists! The bot is very fast and agile, not to mention of it carrying two powerful motors! It can surely outrun humans regardless of the terrain you're on!
This RoverBot is still a soft prototype even after months of thinking, well maybe its because of funds or other projects we have but anyways. With this progress we hope to 3D design and print a Water resistant cover and upgrade to metal gears .
What is FPV?
Fpv stands for First Person View. Usually we get to see FPV while playing video games specifically for racing games. Fpv is used in military purposes to spy, guard or monitor an area, Even us hobbyist use them for our quadcopters to take aerial photos or just to have fun. Awesome as it sounds it is quite expensive building a quadcopter so we decided to make something smaller and cheaper that runs on land.
How Do You Control It?
RoverBot is based on the famous Arduino development board. Since Arduino supports a wide variety of shields and modules (RC/ WiFi/ Bluetooth), you can choose any type of communication. For this set up we will be using special parts that will give it the capability of long range control, we will be using 2.4Ghz Transmitter, receiver modules to take control over the bot. In the previous version we used Bluetooth which was not really a good combination with FPV since Bluetooth is only good for about 20 meters, but now with my parts and ASCAS' parts we are able to achieve more range.
You can watch the video on the last step
Step 1: Tools & Materials






I got most of my parts from local hobby shops, that includes all the Tamiya products and my Arduino Uno clone, the rest were bought online and were given to me by ASCAS. Please canvas for cheaper prices. Compared to where I buy Tamiya products, Pololu retails Tamiya kits that costs 2x more. If you live in the Philippines then you are lucky enough to have "Lil's Hobby Shop" (located @ SM Megamall & Glorietta 2).
Parts & Matterials: I got most of my parts from Gearbest they will have a sale on 03/22/16
- Arduino UNO R3 Clone
- Pololu Dual VNH5019 Motor Shield (2x30A)
-Male Pin headers
-4x Standoff
- Extra M3 screw and nut
- 2.4 Ghz Transmitter Module (Planes/Cars)....... READ step 13 for more info about thid
-2.4 Ghz Receiver module at least 2ch
- 2x Tamiya Plasma Dash Motors/ Hyper dash 3
- Tamiya Twin Motor Gearbox Set (stock motors included)
- 2x Tamiya Universal Plate Set
- Tamiya Track & Wheel Set
- 3 cell 1500mAh LiPo Battery
- FPV CAMERA with pan and tilt
-5.8Ghz 200mW FPV Transmitter and receiver
- Super Glue Bottle
- Sugru Sachet/ Hot Glue
Tools:
- Leatherman
- Screwdriver Set
- Dremel Rotary Tool
Step 2: Assemble the Twin Gearbox


Time to unbox the gearbox! Simply follow the instruction inside and you will be fine
HUGE REMINDER: USE THE "58:1" GEAR RATIO!
Tips & Reminders:
- Grease the gears after assembling the gearbox. (not before)
- Don't forget the metal spacers, or the gearbox will screech.
- Go for the 58:1 gear ratio, it's faster than the 204:1 gear ratio.
Step 3: Upgrade Motors? Why Not!

The gearbox includes stock motors which are pretty slow if you ask me. So I decided to use my old Hyper dash motors for this project instead of using my friends Plasma dash which consumes more energy.
So far Plasma Dash Motors are still the fastest in Tamiya's 4WD mini motor series. The motors may be pricey but, you'll get the most out of your money. It's a carbon brushed motor that spins 29,000 rpm (@3v) and 36,000rpm (@7v). The motors are designed to operate with a 3v power source, increasing the voltage would result to a higher rpm rate but would wear out the c.brushes a lot quicker. It would be ideal to stick with a 3v-6v output. With the Pololu 2x30 Motor Driver and a 2 cell LiPo battery, the Arduino's program must be set to a max speed of 320/400, you'll soon find out what this means in the coding step/ page.
Step 4: Motor Drivers!


I've been into robotics for a long time now and so far the best motor driver you could get is from pololu "Pololu Dual VNH5019" When it comes to power and efficiency this is the best but when it comes to price this is not really your friend.
Another choice is making an L298 motor driver. 1 L298 is for 1 motor that is the best idea for using high curent motors. I will show you guys how made my own version of this
Step 5: Assemble the Track Set


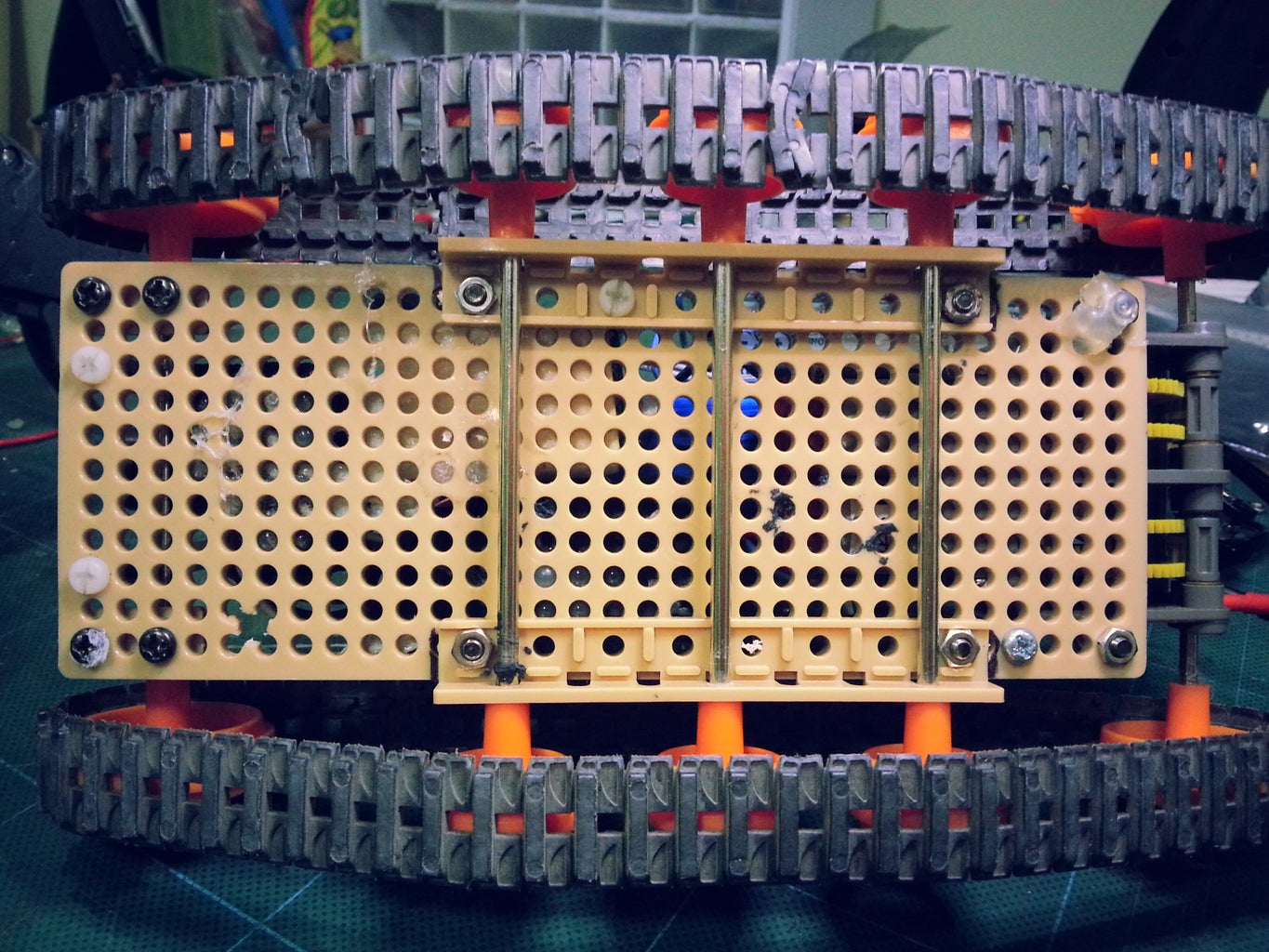

Get wild! maximize your space do as you wish for track configuration
Step 6: Screw in the Standoffs and Attach the FPV


be creative position your stand offs and FPV parts in place and apply small amount of hot glue to set everything in place. Attach the top deck and drill some necessary holes for the FPV Antenna and standoff holes, after that screw in some M3 screws.
Step 7: Put the Top Deck

My purpose for adding the top deck is so that we can have more space since the FPV parts consumed a lot of space at the bottom. leaving no space for the arduino uno clone and motor driver.
Step 8: Mount the Arduino & Motor Driver

Simply screw or glue the Arduino in place on the top deck then stack the motor driver above it.
Step 9: Get Your 2.4Ghz Receiver


It time to connect the Rx module to the arduino
Using channel 1 and 2 Connect 1 to A0 and 2 to A1
Supply the receiver With 5V and the ground from the arduino pins.
Step 10: Connect Your Motors and Battery



Solder some wires on the motor then connect it to the motor driver according to channel
For the battery you will need to DIY your own connector by using a male JST plug and male deans plug look at the picture to better understand how I made mine
Step 11: Battery!
Get your battery and plan out where to put it when its done.
When you have an idea where to place it Make a male adapter for the batteries plug . With the 3S 12V Li-po you will supply the FPV cam and the motor driver and arduino so you will need to make a connector for the motor driver supply line and for the FPV supply line.
Step 12: The Arduino Codes (C++)

This code is super simple just upload and it should now work with the pololu VNH motor driver (make sure you donwnload the motor driver library and put inside the Arduino library folder
The code is similar to the Zumobot RC I just replaced the motor driver library and tweaked some stuff
For L298 motor driver USERS USE THE NORMAL ZUMOBOT RC CONTROL EXAMPLE just connect thing according based on the library
#define PWM_L 10 ///LEFT MOTOR
#define PWM_R 9
#define DIR_L 8 ///LEFT motor
#define DIR_R 7
Just upload and proceed to next step

Step 13: Controller!


So there are different types of controller out there for RC may it be for land, water, or air and it can also some in different types of frequency like AM, FM, or the famous 2.4Ghz but in the end it all comes down to the general purpose controller. I dont really know the exact name of the controller but it is definitely not called Gun type controller but the controller for general purposes is used for aircrafts since it has more channels compared to the gun type.
The controller Im using right now is a Turnigy 9XR Transmitter Mode 2 (No Module) as you see i says there is no module well this is because it is up to you to choose your type of 2.4Ghz connection. There are dozens of brands that carry different connections all differ in terms or control range and features. The module i am using right now is a FrSky DJT 2.4Ghz Combo Pack for JR w/ Telemetry Module & V8FR-II RX looks kinda pricey right but check out the features, specs and price im sure you will also like it not to mention it also comes with a receiver already!.And lastly Remember even if you have the controller and modules you cant turn it on untill you get batteries depends on your controllers model you might need to use Li-po batteries just like mine I need 2200mah 3S LI-po anyways just check or research the controller you want and you will know what to get.
TIPS
If you are a beginner I suggest asking around local hobby shops or RC groups....better to be sure than to be sorry. cuz this part or step is not a joke or a toy since these are quite expensive.
Step 14: Test It Out




First power up Roverbot then turn on your transmitter module once done the receiver module should indicate a successful binding connecting Via L.E.D
Beginners guide for FPV
The one on the roverbot is called the FPV transmitter and Camera, And the other one on you hand is called the FPV Receiver. The receiver is connected to any TV may it be an LCD TV, TFT etc. All you really have to do is supply it with 12V using a battery or external power supply. Turn it on then change the channel on the FPV receiver if needed. After that you should now be able to see visual of what you roverbot sees
FPV signal chappy?
The one I suggested Is cheap and affordable it can reach a maximum distance of 1.5km - 2km but this will only apply when you use it in an open field, if you are planning to get more signal strength then buy an FPV transmitter stronger than this like those 1000mW FPV transmitters. Take note the one I showed you guys is just 200mW which is the cheapest one you can find out there.
Antenna Upgrade!
Upgrading the antenna into a Clover antenna is a good Idea it extends your range and strengthens the signal.
Step 15: You Are Basically Done!




Last step ..... HAVE fun
If you like the project click on the Favorite button and vote to support me in my builds
Also support by best friend ASCAS who has helped me a lot in providing me the parts and ideas
check out ROVERBOT 1 BLUETOOTH VERSION
Step 16: VIDEO
I guess I dont have the skill to take good videos but I will just share our previous version.This is our Bluetooth Version running with the plasma dash I guess I would say our old configuration was stylish but the tracks usually slide off so we just followed the normal configuration. Again to see the phone controlled version check out ASCAS

Second Prize in the
Remote Control Contest

Participated in the
Battery Powered Contest

Participated in the
Glue Contest




![Tim's Mechanical Spider Leg [LU9685-20CU]](https://content.instructables.com/FFB/5R4I/LVKZ6G6R/FFB5R4ILVKZ6G6R.png?auto=webp&crop=1.2%3A1&frame=1&width=306)


