

Introduction: Smart Dustbin With Using Arduino





The goal of this project is to keep our
Environment clean. Benefits of using Smart
Dustbin Bins.
• It will stop overflowing of dustbins along
roadsides and localities as smart Dustbins
Are managed at real time.
• It also aims at creating a clean as well as
Green environment.
• By using the routing algorithm it will smartly
find the shortest route thus it will reduce the
number of vehicles used for garbage
collection.
This Project has been made in the KHERA JATTAN NOOK
Makers name
Jyoti
soni
Pawan
Step 1: Material
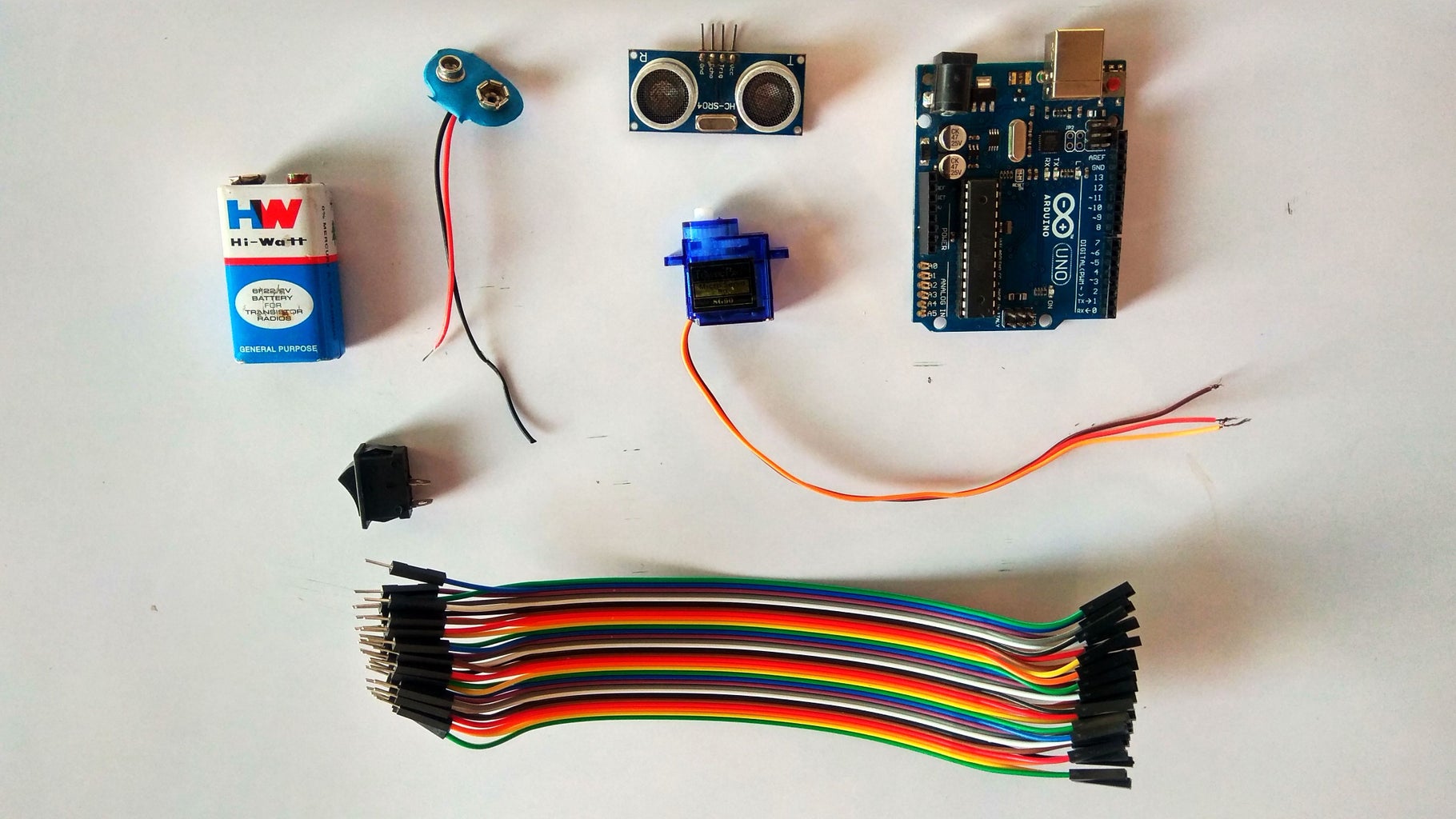
1. Ultrasonic Sensor
2. Arduino
3. Servo Moter S9
4. Jumper Wire
5. Switch
6. Battery
7. Battery Clipper
Step 2: Arduino Connect to Ultrasonic Sensor

First,take ultrasonic Sensor to Connect it With Arduino
VCC - 5V
Trig - -5
Echo - -6
Gnd - Gnd
Step 3: Arduino Connect to Servo Moter S9

Take a servo Moter S9.
Then servo Positive wire connects Arduino Pin 3.3V
Servo Negative wire Connects Arduino Pin Gnd and then Signal Wire Connect to Arduino Pin 7
Step 4: Connect Switch and Battery


Take a Battery and fix the battery Clipper in it.
Battery Positive Wire Arduino Pin VCC
Battery Negative wire is to Put one Side of the Switch and one side of the Switch Arduino pin GND
Step 5: Fix the Servo Pully With Sheet Metal


Step 6: Fix Material




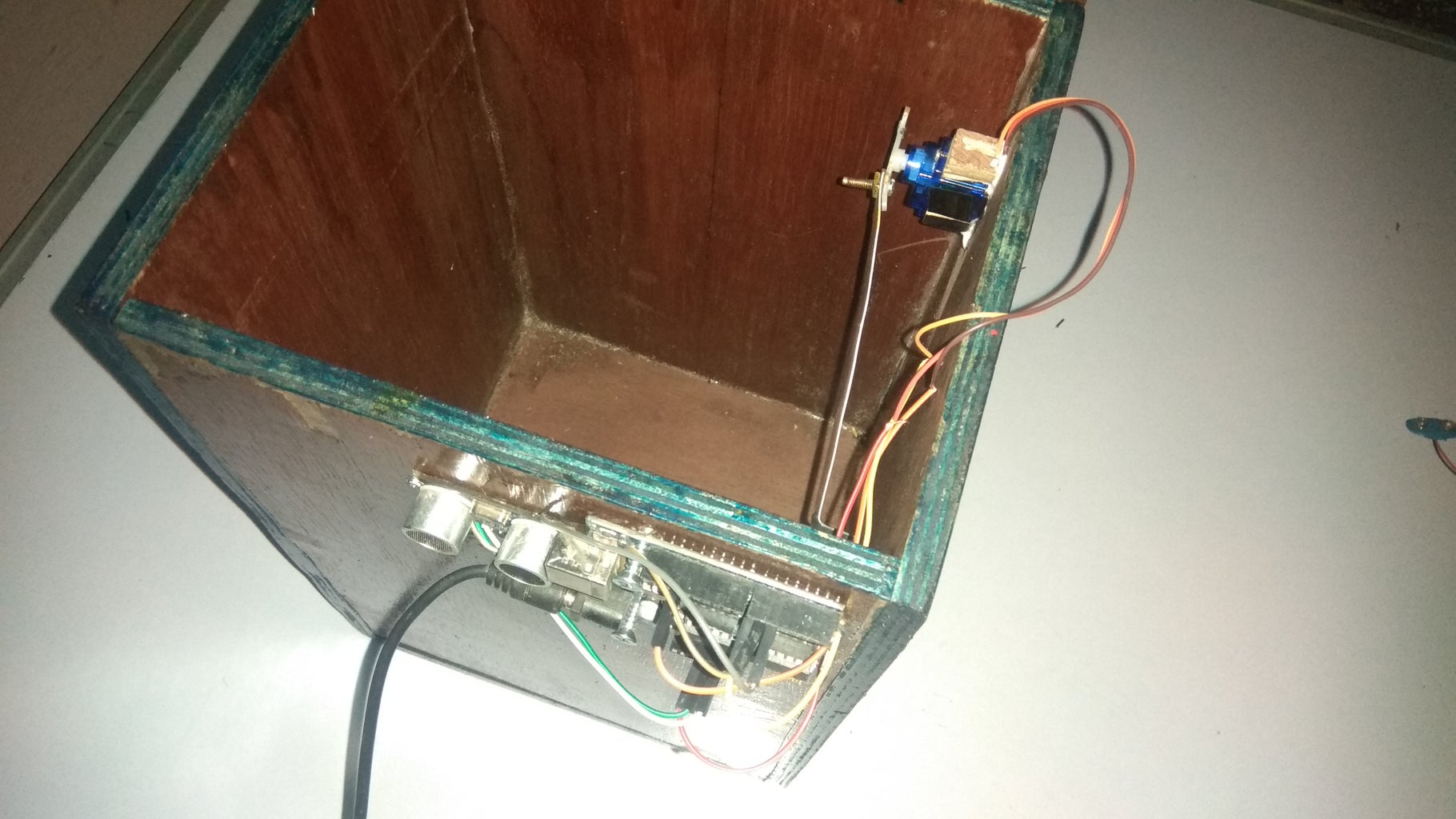
First, took a box and then fix the ultrasonic sensor with the help of the Screwdriver.
Second, then fix the Arduino Uno
After that, the Servo motor fitted.
Step 7: Code Upload

#include
//servo library
Servo servo;
int trigPin = 5;
int echoPin = 6;
int servoPin = 7;
int led= 10;
long duration, dist, average;
long aver[3]; //array for average
void setup() {
Serial.begin(9600);
servo.attach(servoPin);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo.write(0); //close cap on power on
delay(100);
servo.detach();
}
void measure() {
digitalWrite(10,HIGH);
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(15);
digitalWrite(trigPin, LOW);
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
dist = (duration/2) / 29.1; //obtain distance
}
void loop() {
for (int i=0;i<=2;i++) { //average distance
measure();
aver[i]=dist;
delay(10); //delay between measurements
}
dist=(aver[0]+aver[1]+aver[2])/3;
if ( dist<50 ) {
//Change distance as per your need
servo.attach(servoPin);
delay(1);
servo.write(0);
delay(3000);
servo.write(150);
delay(1000);
servo.detach();
}
Serial.print(dist);
}
Step 8: It's Ready








